This repository is a modified version of FLVIS (see original README below). We facilitate the installation process and the use of Docker.
In order to facilitate the installation process, the system is wrapped up using Docker. We provide scripts to create a Docker image, build the system and run it in a Docker container.
- Docker
- ROS
pose_listener(if you userun_rosario_sequence.sh, see below)
Run:
./run.sh -b
This command creates a Docker image, installs all the dependencies and builds the system. The resulting image contains a version of the system ready to be run.
If you are not interested in making changes in the source code, you should run the system in VIS mode. Run:
./run.sh -v
The system is launched in a Docker container based on the previously built image. By default, this command executes a launch file which is configured to run the Rosario dataset. If you want to run your own dataset, write a launch file and placed it in the launch/ folder. Then, run the script with the option -l <LAUNCH_FILE_NAME>. For example, if you are testing EuRoC, write euroc_dataset.launch, move it into launch/ and type:
./run.sh -v -l euroc_dataset.launch
Making changes in launch files in the host is possible because launch/ folder is mounted into the Docker container. It is not necessary to access the container through a bash shell to modify these files.
See below for information about input data and visualization.
DEV mode allows developers to make changes in the source code, recompile the system and run it with the modifications. To do this, the whole repository is mounted in a container. Run:
./run.sh -d
This opens a bash shell in a docker container. You can edit source files in the host and after that you can use this shell to recompile the system. When the compilation process finishes, you can run the method using roslaunch.
See below for information about input data and visualization.
At this point, the system is waiting for input data. Either you can run rosbag play or you can use run_rosario_sequence.sh.
If you choose the latter, open a second terminal and run:
./run_rosario_sequence.sh -o <OUTPUT_TRAJECTORY_FILE> <ROSBAG_FILE>
In contrast to what run.sh does, run_rosario_sequence.sh executes commands in the host (you can modify it to use a Docker container).
ROSBAG_FILE is played using rosbag. Also, make sure you have cloned and built pose_listener in your catkin workspace. Default path for the workspace is ${HOME}/catkin_ws, set CATKIN_WS_DIR if the workspace is somewhere else (e.g.: export CATKIN_WS_DIR=$HOME/foo_catkin_ws). pose_listener saves the estimated trajectory in <OUTPUT_TRAJECTORY_FILE> (use absolute path). You can edit run_rosario_sequence.sh if you prefer to save the trajectory using your own methods. Additionally, run_rosario_sequence.sh launches rviz to display visual information during the execution of the system.
Alternatively, if you are not interested in development but in testing or visualization, instead of running run.sh and run_rosario_sequence.sh in two different terminals, you can just run:
./run_rosario_sequence.sh -r -o <OUTPUT_TRAJECTORY_FILE> <ROSBAG_FILE>
This launches a Docker container and executes the default launch file (see LAUNCH_FILE in run.sh). After that, the bagfile is played and rviz and pose_listener are launched. Add -b if you want to turn off the visualization.
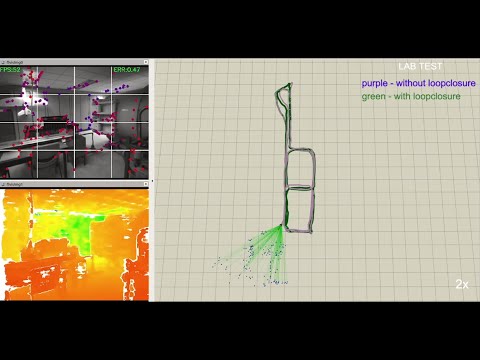
| EuRoC DataSet MH_05 | Handheld Test in Lab | FlVIS on UAV Platform |
|---|---|---|


|


|


|
Under Review, a pre-print version can be found here
Intel RealSense D435i Camera
EuRoC MAV Dataset
We have tested in the following environment:
Ubuntu 16.04 + ROS Kinetic
Ubuntu 18.04 + ROS melodic
Clone the repository to the catkin work space eg. /catkin_ws/src
git clone https://github.com/Ttoto/FLVIS.git
Install 3rd Part library
cd catkin_ws/src/FLVIS/3rdPartLib/
./install3rdPartLib.sh
Compile
cd ~/catkin_ws
catkin_make
Download the dataset Link-melab_sn943222072828.bag to /bag folder
Decompress the rosbag:
rosbag decompress melab_sn943222072828.bag
run the following launch files:
roslaunch flvis rviz.launch
roslaunch flvis flvis_bag.launch
Install the realsense driver and its ros wrapper
Boot the d435i camera and echo the camera infomation
roslaunch flvis d435i_depth.launch
rostopic echo /camera/infra1/camera_info
You will get the camera infomation like:
 As shown, where the resolution is 640x480 and fx=384.16455078125; fy=384.16455078125; cx=320.2144470214844;cy=238.94403076171875.
As shown, where the resolution is 640x480 and fx=384.16455078125; fy=384.16455078125; cx=320.2144470214844;cy=238.94403076171875.
Edit these information in the config yaml file (say: /launch/d435i/sn943222072828_depth.yaml):
image_width: 640
image_height: 480
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2In the launch file "flvis_d435i.launch", make sure "/yamlconfigfile" is point to the edited config file
<param name="/yamlconfigfile" type="string" value="$(find flvis)/launch/d435i/sn943222072828_depth.yaml"/>
run the following launch files:
roslaunch flvis rviz.launch
roslaunch flvis flvis_d435i_depth.launch
Like what we did in 5.1.2, we need to config the sn943222072828_stereo.yaml
Note that, by default the two camera share the same intrinsic parameters, and the baseline length is 0.05m:
cam0_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam0_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
cam1_intrinsics: [384.16455078125, 384.16455078125, 320.2144470214844, 238.94403076171875]#fx fy cx cy
cam1_distortion_coeffs: [0.0, 0.0, 0.0, 0.0]#k1 k2 r1 r2
T_cam0_cam1:
[ 1.0, 0.0, 0.0, 0.05,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0]
Download the dataset(say MH_05_difficult) into the bag folder:
roscd flvis/bag/
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_05_difficult/MH_05_difficult.bag
Edit the corresponding bag name in flvis_euroc_mav.launch file:
<node pkg="rosbag" type="play" name="rosbag" args="$(find flvis)/bag/MH_05_difficult.bag"/>
run the following launch files:
roslaunch flvis rviz.launch
roslaunch flvis flvis_euroc_mav.launch
Shengyang Chen(Dept.ME,PolyU): shengyang.chen@connect.polyu.hk
Yajing Zou(Dept.LSGI,PolyU):rick.zou@connect.polyu.hk