diff --git a/.JuliaFormatter.toml b/.JuliaFormatter.toml
index 453925c3f..9c7935911 100644
--- a/.JuliaFormatter.toml
+++ b/.JuliaFormatter.toml
@@ -1 +1,2 @@
-style = "sciml"
\ No newline at end of file
+style = "sciml"
+format_markdown = true
\ No newline at end of file
diff --git a/LICENSE.md b/LICENSE.md
index fe0aec9e5..0a2bc6bad 100644
--- a/LICENSE.md
+++ b/LICENSE.md
@@ -19,4 +19,3 @@ The SciMLSensitivity.jl package is licensed under the MIT "Expat" License:
> LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
> OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
> SOFTWARE.
->
diff --git a/README.md b/README.md
index e1a738f9b..8f05a433d 100644
--- a/README.md
+++ b/README.md
@@ -7,17 +7,16 @@
[](https://github.com/SciML/SciMLSensitivity.jl/actions?query=workflow%3ACI)
[](https://buildkite.com/julialang/scimlsensitivity-dot-jl)
-[](https://github.com/SciML/ColPrac)
+[](https://github.com/SciML/ColPrac)
[](https://github.com/SciML/SciMLStyle)
-SciMLSensitivity.jl is a component package in the [SciML Scientific Machine Learning ecosystem](https://sciml.ai/).
+SciMLSensitivity.jl is a component package in the [SciML Scientific Machine Learning ecosystem](https://sciml.ai/).
It holds the sensitivity analysis utilities. Users interested in using this
functionality should check out [DifferentialEquations.jl](https://docs.sciml.ai/DiffEqDocs/stable/).
-
## Tutorials and Documentation
For information on using the package,
[see the stable documentation](https://docs.sciml.ai/SciMLSensitivity/stable/). Use the
[in-development documentation](https://docs.sciml.ai/SciMLSensitivity/dev/) for the version of
-the documentation, which contains the unreleased features.
\ No newline at end of file
+the documentation, which contains the unreleased features.
diff --git a/docs/src/Benchmark.md b/docs/src/Benchmark.md
index a78b675b3..c7f17e58e 100644
--- a/docs/src/Benchmark.md
+++ b/docs/src/Benchmark.md
@@ -32,8 +32,8 @@ at this time.
Quick summary:
-- `BacksolveAdjoint` can be the fastest (but use with caution!); about 25% faster
-- Using `ZygoteVJP` is faster than other vjp choices with FastDense due to the overloads
+ - `BacksolveAdjoint` can be the fastest (but use with caution!); about 25% faster
+ - Using `ZygoteVJP` is faster than other vjp choices with FastDense due to the overloads
```julia
using DiffEqFlux, OrdinaryDiffEq, Flux, Optim, Plots, SciMLSensitivity,
@@ -46,13 +46,13 @@ tsteps = range(tspan[1], tspan[2], length = datasize)
function trueODEfunc(du, u, p, t)
true_A = [-0.1 2.0; -2.0 -0.1]
- du .= ((u.^3)'true_A)'
+ du .= ((u .^ 3)'true_A)'
end
prob_trueode = ODEProblem(trueODEfunc, u0, tspan)
ode_data = Array(solve(prob_trueode, Tsit5(), saveat = tsteps))
-dudt2 = FastChain((x, p) -> x.^3,
+dudt2 = FastChain((x, p) -> x .^ 3,
FastDense(2, 50, tanh),
FastDense(50, 2))
Random.seed!(100)
@@ -66,10 +66,11 @@ function loss_neuralode(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode,p)
+@btime Zygote.gradient(loss_neuralode, p)
# 2.709 ms (56506 allocations: 6.62 MiB)
-prob_neuralode_interpolating = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=InterpolatingAdjoint(autojacvec=ReverseDiffVJP(true)))
+prob_neuralode_interpolating = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = InterpolatingAdjoint(autojacvec = ReverseDiffVJP(true)))
function loss_neuralode_interpolating(p)
pred = Array(prob_neuralode_interpolating(u0, p))
@@ -77,10 +78,11 @@ function loss_neuralode_interpolating(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_interpolating,p)
+@btime Zygote.gradient(loss_neuralode_interpolating, p)
# 5.501 ms (103835 allocations: 2.57 MiB)
-prob_neuralode_interpolating_zygote = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=InterpolatingAdjoint(autojacvec=ZygoteVJP()))
+prob_neuralode_interpolating_zygote = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = InterpolatingAdjoint(autojacvec = ZygoteVJP()))
function loss_neuralode_interpolating_zygote(p)
pred = Array(prob_neuralode_interpolating_zygote(u0, p))
@@ -88,10 +90,11 @@ function loss_neuralode_interpolating_zygote(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_interpolating_zygote,p)
+@btime Zygote.gradient(loss_neuralode_interpolating_zygote, p)
# 2.899 ms (56150 allocations: 6.61 MiB)
-prob_neuralode_backsolve = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=BacksolveAdjoint(autojacvec=ReverseDiffVJP(true)))
+prob_neuralode_backsolve = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = BacksolveAdjoint(autojacvec = ReverseDiffVJP(true)))
function loss_neuralode_backsolve(p)
pred = Array(prob_neuralode_backsolve(u0, p))
@@ -99,10 +102,11 @@ function loss_neuralode_backsolve(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_backsolve,p)
+@btime Zygote.gradient(loss_neuralode_backsolve, p)
# 4.871 ms (85855 allocations: 2.20 MiB)
-prob_neuralode_quad = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=QuadratureAdjoint(autojacvec=ReverseDiffVJP(true)))
+prob_neuralode_quad = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = QuadratureAdjoint(autojacvec = ReverseDiffVJP(true)))
function loss_neuralode_quad(p)
pred = Array(prob_neuralode_quad(u0, p))
@@ -110,10 +114,11 @@ function loss_neuralode_quad(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_quad,p)
+@btime Zygote.gradient(loss_neuralode_quad, p)
# 11.748 ms (79549 allocations: 3.87 MiB)
-prob_neuralode_backsolve_tracker = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=BacksolveAdjoint(autojacvec=TrackerVJP()))
+prob_neuralode_backsolve_tracker = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = BacksolveAdjoint(autojacvec = TrackerVJP()))
function loss_neuralode_backsolve_tracker(p)
pred = Array(prob_neuralode_backsolve_tracker(u0, p))
@@ -121,10 +126,11 @@ function loss_neuralode_backsolve_tracker(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_backsolve_tracker,p)
+@btime Zygote.gradient(loss_neuralode_backsolve_tracker, p)
# 27.604 ms (186143 allocations: 12.22 MiB)
-prob_neuralode_backsolve_zygote = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=BacksolveAdjoint(autojacvec=ZygoteVJP()))
+prob_neuralode_backsolve_zygote = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = BacksolveAdjoint(autojacvec = ZygoteVJP()))
function loss_neuralode_backsolve_zygote(p)
pred = Array(prob_neuralode_backsolve_zygote(u0, p))
@@ -132,10 +138,11 @@ function loss_neuralode_backsolve_zygote(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_backsolve_zygote,p)
+@btime Zygote.gradient(loss_neuralode_backsolve_zygote, p)
# 2.091 ms (49883 allocations: 6.28 MiB)
-prob_neuralode_backsolve_false = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=BacksolveAdjoint(autojacvec=ReverseDiffVJP(false)))
+prob_neuralode_backsolve_false = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = BacksolveAdjoint(autojacvec = ReverseDiffVJP(false)))
function loss_neuralode_backsolve_false(p)
pred = Array(prob_neuralode_backsolve_false(u0, p))
@@ -143,10 +150,11 @@ function loss_neuralode_backsolve_false(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_backsolve_false,p)
+@btime Zygote.gradient(loss_neuralode_backsolve_false, p)
# 4.822 ms (9956 allocations: 1.03 MiB)
-prob_neuralode_tracker = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps, sensealg=TrackerAdjoint())
+prob_neuralode_tracker = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps,
+ sensealg = TrackerAdjoint())
function loss_neuralode_tracker(p)
pred = Array(prob_neuralode_tracker(u0, p))
@@ -154,6 +162,6 @@ function loss_neuralode_tracker(p)
return loss
end
-@btime Zygote.gradient(loss_neuralode_tracker,p)
+@btime Zygote.gradient(loss_neuralode_tracker, p)
# 12.614 ms (76346 allocations: 3.12 MiB)
```
diff --git a/docs/src/examples/dae/physical_constraints.md b/docs/src/examples/dae/physical_constraints.md
index 48a19ce22..ecf20fe65 100644
--- a/docs/src/examples/dae/physical_constraints.md
+++ b/docs/src/examples/dae/physical_constraints.md
@@ -17,18 +17,18 @@ rng = Random.default_rng()
function f!(du, u, p, t)
y₁, y₂, y₃ = u
k₁, k₂, k₃ = p
- du[1] = -k₁*y₁ + k₃*y₂*y₃
- du[2] = k₁*y₁ - k₃*y₂*y₃ - k₂*y₂^2
- du[3] = y₁ + y₂ + y₃ - 1
+ du[1] = -k₁ * y₁ + k₃ * y₂ * y₃
+ du[2] = k₁ * y₁ - k₃ * y₂ * y₃ - k₂ * y₂^2
+ du[3] = y₁ + y₂ + y₃ - 1
return nothing
end
u₀ = [1.0, 0, 0]
-M = [1. 0 0
- 0 1. 0
- 0 0 0]
+M = [1.0 0 0
+ 0 1.0 0
+ 0 0 0]
-tspan = (0.0,1.0)
+tspan = (0.0, 1.0)
p = [0.04, 3e7, 1e4]
stiff_func = ODEFunction(f!, mass_matrix = M)
@@ -36,12 +36,12 @@ prob_stiff = ODEProblem(stiff_func, u₀, tspan, p)
sol_stiff = solve(prob_stiff, Rodas5(), saveat = 0.1)
nn_dudt2 = Lux.Chain(Lux.Dense(3, 64, tanh),
- Lux.Dense(64, 2))
+ Lux.Dense(64, 2))
pinit, st = Lux.setup(rng, nn_dudt2)
model_stiff_ndae = NeuralODEMM(nn_dudt2, (u, p, t) -> [u[1] + u[2] + u[3] - 1],
- tspan, M, Rodas5(autodiff=false), saveat = 0.1)
+ tspan, M, Rodas5(autodiff = false), saveat = 0.1)
model_stiff_ndae(u₀, Lux.ComponentArray(pinit), st)
function predict_stiff_ndae(p)
@@ -62,12 +62,11 @@ end
l1 = first(loss_stiff_ndae(Lux.ComponentArray(pinit)))
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p) -> loss_stiff_ndae(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_stiff_ndae(x), adtype)
optprob = Optimization.OptimizationProblem(optf, Lux.ComponentArray(pinit))
-result_stiff = Optimization.solve(optprob, NLopt.LD_LBFGS(), maxiters=100)
+result_stiff = Optimization.solve(optprob, NLopt.LD_LBFGS(), maxiters = 100)
```
-
## Step-by-Step Description
### Load Packages
@@ -88,9 +87,9 @@ fitting difficult.
function f!(du, u, p, t)
y₁, y₂, y₃ = u
k₁, k₂, k₃ = p
- du[1] = -k₁*y₁ + k₃*y₂*y₃
- du[2] = k₁*y₁ - k₃*y₂*y₃ - k₂*y₂^2
- du[3] = y₁ + y₂ + y₃ - 1
+ du[1] = -k₁ * y₁ + k₃ * y₂ * y₃
+ du[2] = k₁ * y₁ - k₃ * y₂ * y₃ - k₂ * y₂^2
+ du[3] = y₁ + y₂ + y₃ - 1
return nothing
end
```
@@ -100,21 +99,20 @@ end
```@example dae2
u₀ = [1.0, 0, 0]
-M = [1. 0 0
- 0 1. 0
- 0 0 0]
+M = [1.0 0 0
+ 0 1.0 0
+ 0 0 0]
-tspan = (0.0,1.0)
+tspan = (0.0, 1.0)
p = [0.04, 3e7, 1e4]
```
-- `u₀` = Initial Conditions
-- `M` = Semi-explicit Mass Matrix (last row is the constraint equation and are therefore
-all zeros)
-- `tspan` = Time span over which to evaluate
-- `p` = parameters `k1`, `k2` and `k3` of the differential equation above
-
+ - `u₀` = Initial Conditions
+ - `M` = Semi-explicit Mass Matrix (last row is the constraint equation and are therefore
+ all zeros)
+ - `tspan` = Time span over which to evaluate
+ - `p` = parameters `k1`, `k2` and `k3` of the differential equation above
### ODE Function, Problem and Solution
@@ -138,12 +136,12 @@ is more suited to SciML applications (similarly for
```@example dae2
nn_dudt2 = Lux.Chain(Lux.Dense(3, 64, tanh),
- Lux.Dense(64, 2))
+ Lux.Dense(64, 2))
pinit, st = Lux.setup(rng, nn_dudt2)
model_stiff_ndae = NeuralODEMM(nn_dudt2, (u, p, t) -> [u[1] + u[2] + u[3] - 1],
- tspan, M, Rodas5(autodiff=false), saveat = 0.1)
+ tspan, M, Rodas5(autodiff = false), saveat = 0.1)
model_stiff_ndae(u₀, Lux.ComponentArray(pinit), st)
```
@@ -195,8 +193,8 @@ The callback function displays the loss during training.
```@example dae2
callback = function (p, l, pred) #callback function to observe training
- display(l)
- return false
+ display(l)
+ return false
end
```
@@ -207,7 +205,7 @@ Finally, training with `Optimization.solve` by passing: *loss function*, *model
```@example dae2
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p) -> loss_stiff_ndae(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_stiff_ndae(x), adtype)
optprob = Optimization.OptimizationProblem(optf, Lux.ComponentArray(pinit))
-result_stiff = Optimization.solve(optprob, NLopt.LD_LBFGS(), maxiters=100)
+result_stiff = Optimization.solve(optprob, NLopt.LD_LBFGS(), maxiters = 100)
```
diff --git a/docs/src/examples/dde/delay_diffeq.md b/docs/src/examples/dde/delay_diffeq.md
index 7d1d4c345..ab45413fa 100644
--- a/docs/src/examples/dde/delay_diffeq.md
+++ b/docs/src/examples/dde/delay_diffeq.md
@@ -8,13 +8,12 @@ like:
using DifferentialEquations, Optimization, SciMLSensitivity,
OptimizationPolyalgorithms
-
# Define the same LV equation, but including a delay parameter
function delay_lotka_volterra!(du, u, h, p, t)
- x, y = u
- α, β, δ, γ = p
- du[1] = dx = (α - β*y) * h(p, t-0.1)[1]
- du[2] = dy = (δ*x - γ) * y
+ x, y = u
+ α, β, δ, γ = p
+ du[1] = dx = (α - β * y) * h(p, t - 0.1)[1]
+ du[2] = dy = (δ * x - γ) * y
end
# Initial parameters
@@ -32,26 +31,28 @@ prob_dde = DDEProblem(delay_lotka_volterra!, u0, h, (0.0, 10.0),
constant_lags = [0.1])
function predict_dde(p)
- return Array(solve(prob_dde, MethodOfSteps(Tsit5()),
- u0=u0, p=p, saveat = 0.1,
- sensealg = ReverseDiffAdjoint()))
+ return Array(solve(prob_dde, MethodOfSteps(Tsit5()),
+ u0 = u0, p = p, saveat = 0.1,
+ sensealg = ReverseDiffAdjoint()))
end
-loss_dde(p) = sum(abs2, x-1 for x in predict_dde(p))
+loss_dde(p) = sum(abs2, x - 1 for x in predict_dde(p))
using Plots
-callback = function (p,l...;doplot=false)
- display(loss_dde(p))
- doplot && display(plot(solve(remake(prob_dde,p=p),MethodOfSteps(Tsit5()),saveat=0.1),ylim=(0,6)))
- return false
+callback = function (p, l...; doplot = false)
+ display(loss_dde(p))
+ doplot &&
+ display(plot(solve(remake(prob_dde, p = p), MethodOfSteps(Tsit5()), saveat = 0.1),
+ ylim = (0, 6)))
+ return false
end
-callback(p,loss_dde(p)...)
+callback(p, loss_dde(p)...)
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_dde(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_dde(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p)
-result_dde = Optimization.solve(optprob, PolyOpt(), maxiters = 300, callback=callback)
+result_dde = Optimization.solve(optprob, PolyOpt(), maxiters = 300, callback = callback)
```
Notice that we chose `sensealg = ReverseDiffAdjoint()` to utilize the ReverseDiff.jl
@@ -61,20 +62,22 @@ We define a callback to display the solution at the current parameters for each
```@example dde
using Plots
-callback = function (p,l...;doplot=false)
- display(loss_dde(p))
- doplot && display(plot(solve(remake(prob_dde,p=p),MethodOfSteps(Tsit5()),saveat=0.1),ylim=(0,6)))
- return false
+callback = function (p, l...; doplot = false)
+ display(loss_dde(p))
+ doplot &&
+ display(plot(solve(remake(prob_dde, p = p), MethodOfSteps(Tsit5()), saveat = 0.1),
+ ylim = (0, 6)))
+ return false
end
-callback(p,loss_dde(p)...)
+callback(p, loss_dde(p)...)
```
We use `Optimization.solve` to optimize the parameters for our loss function:
```@example dde
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_dde(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_dde(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p)
-result_dde = Optimization.solve(optprob, PolyOpt(), callback=callback)
+result_dde = Optimization.solve(optprob, PolyOpt(), callback = callback)
```
diff --git a/docs/src/examples/hybrid_jump/bouncing_ball.md b/docs/src/examples/hybrid_jump/bouncing_ball.md
index 61fe1141d..900fbbab5 100644
--- a/docs/src/examples/hybrid_jump/bouncing_ball.md
+++ b/docs/src/examples/hybrid_jump/bouncing_ball.md
@@ -10,25 +10,25 @@ first start by implementing the ODE:
```@example bouncing_ball
using Optimization, OptimizationPolyalgorithms, SciMLSensitivity, DifferentialEquations
-function f(du,u,p,t)
- du[1] = u[2]
- du[2] = -p[1]
+function f(du, u, p, t)
+ du[1] = u[2]
+ du[2] = -p[1]
end
-function condition(u,t,integrator) # Event when event_f(u,t) == 0
- u[1]
+function condition(u, t, integrator) # Event when event_f(u,t) == 0
+ u[1]
end
function affect!(integrator)
- integrator.u[2] = -integrator.p[2]*integrator.u[2]
+ integrator.u[2] = -integrator.p[2] * integrator.u[2]
end
-callback = ContinuousCallback(condition,affect!)
-u0 = [50.0,0.0]
-tspan = (0.0,15.0)
+callback = ContinuousCallback(condition, affect!)
+u0 = [50.0, 0.0]
+tspan = (0.0, 15.0)
p = [9.8, 0.8]
-prob = ODEProblem(f,u0,tspan,p)
-sol = solve(prob,Tsit5(),callback=callback)
+prob = ODEProblem(f, u0, tspan, p)
+sol = solve(prob, Tsit5(), callback = callback)
```
Here we have a friction coefficient of `0.8`. We want to refine this
@@ -38,14 +38,14 @@ the value 20:
```@example bouncing_ball
function loss(θ)
- sol = solve(prob,Tsit5(),p=[9.8,θ[1]],callback=callback)
- target = 20.0
- abs2(sol[end][1] - target)
+ sol = solve(prob, Tsit5(), p = [9.8, θ[1]], callback = callback)
+ target = 20.0
+ abs2(sol[end][1] - target)
end
loss([0.8])
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, [0.8])
@time res = Optimization.solve(optprob, PolyOpt(), maxiters = 300)
@show res.u # [0.866554105436901]
diff --git a/docs/src/examples/hybrid_jump/hybrid_diffeq.md b/docs/src/examples/hybrid_jump/hybrid_diffeq.md
index 52e57a200..969631a52 100644
--- a/docs/src/examples/hybrid_jump/hybrid_diffeq.md
+++ b/docs/src/examples/hybrid_jump/hybrid_diffeq.md
@@ -1,7 +1,7 @@
# Training Neural Networks in Hybrid Differential Equations
Hybrid differential equations are differential equations with implicit or
-explicit discontinuities as specified by
+explicit discontinuities as specified by
[callbacks](https://docs.sciml.ai/DiffEqDocs/stable/features/callback_functions/).
In the following example, explicit dosing times are given for a pharmacometric
model and the universal differential equation is trained to uncover the missing
@@ -9,57 +9,58 @@ dynamical equations.
```@example
using DiffEqFlux, Flux, DifferentialEquations, Plots
-u0 = Float32[2.; 0.]
+u0 = Float32[2.0; 0.0]
datasize = 100
-tspan = (0.0f0,10.5f0)
-dosetimes = [1.0,2.0,4.0,8.0]
+tspan = (0.0f0, 10.5f0)
+dosetimes = [1.0, 2.0, 4.0, 8.0]
function affect!(integrator)
- integrator.u = integrator.u.+1
+ integrator.u = integrator.u .+ 1
end
-cb_ = PresetTimeCallback(dosetimes,affect!,save_positions=(false,false))
-function trueODEfunc(du,u,p,t)
+cb_ = PresetTimeCallback(dosetimes, affect!, save_positions = (false, false))
+function trueODEfunc(du, u, p, t)
du .= -u
end
-t = range(tspan[1],tspan[2],length=datasize)
+t = range(tspan[1], tspan[2], length = datasize)
-prob = ODEProblem(trueODEfunc,u0,tspan)
-ode_data = Array(solve(prob,Tsit5(),callback=cb_,saveat=t))
-dudt2 = Flux.Chain(Flux.Dense(2,50,tanh),
- Flux.Dense(50,2))
-p,re = Flux.destructure(dudt2) # use this p as the initial condition!
+prob = ODEProblem(trueODEfunc, u0, tspan)
+ode_data = Array(solve(prob, Tsit5(), callback = cb_, saveat = t))
+dudt2 = Flux.Chain(Flux.Dense(2, 50, tanh),
+ Flux.Dense(50, 2))
+p, re = Flux.destructure(dudt2) # use this p as the initial condition!
-function dudt(du,u,p,t)
+function dudt(du, u, p, t)
du[1:2] .= -u[1:2]
du[3:end] .= re(p)(u[1:2]) #re(p)(u[3:end])
end
-z0 = Float32[u0;u0]
-prob = ODEProblem(dudt,z0,tspan)
+z0 = Float32[u0; u0]
+prob = ODEProblem(dudt, z0, tspan)
affect!(integrator) = integrator.u[1:2] .= integrator.u[3:end]
-callback = PresetTimeCallback(dosetimes,affect!,save_positions=(false,false))
+callback = PresetTimeCallback(dosetimes, affect!, save_positions = (false, false))
function predict_n_ode()
- _prob = remake(prob,p=p)
- Array(solve(_prob,Tsit5(),u0=z0,p=p,callback=callback,saveat=t,sensealg=ReverseDiffAdjoint()))[1:2,:]
+ _prob = remake(prob, p = p)
+ Array(solve(_prob, Tsit5(), u0 = z0, p = p, callback = callback, saveat = t,
+ sensealg = ReverseDiffAdjoint()))[1:2, :]
#Array(solve(prob,Tsit5(),u0=z0,p=p,saveat=t))[1:2,:]
end
function loss_n_ode()
pred = predict_n_ode()
- loss = sum(abs2,ode_data .- pred)
+ loss = sum(abs2, ode_data .- pred)
loss
end
loss_n_ode() # n_ode.p stores the initial parameters of the neural ODE
-cba = function (;doplot=false) #callback function to observe training
- pred = predict_n_ode()
- display(sum(abs2,ode_data .- pred))
- # plot current prediction against data
- pl = scatter(t,ode_data[1,:],label="data")
- scatter!(pl,t,pred[1,:],label="prediction")
- display(plot(pl))
- return false
+cba = function (; doplot = false) #callback function to observe training
+ pred = predict_n_ode()
+ display(sum(abs2, ode_data .- pred))
+ # plot current prediction against data
+ pl = scatter(t, ode_data[1, :], label = "data")
+ scatter!(pl, t, pred[1, :], label = "prediction")
+ display(plot(pl))
+ return false
end
cba()
diff --git a/docs/src/examples/neural_ode/minibatch.md b/docs/src/examples/neural_ode/minibatch.md
index 982583d7b..876462df9 100644
--- a/docs/src/examples/neural_ode/minibatch.md
+++ b/docs/src/examples/neural_ode/minibatch.md
@@ -2,32 +2,31 @@
```@example
using DifferentialEquations, Flux, Random, Plots
-using IterTools: ncycle
+using IterTools: ncycle
rng = Random.default_rng()
function newtons_cooling(du, u, p, t)
temp = u[1]
k, temp_m = p
- du[1] = dT = -k*(temp-temp_m)
- end
+ du[1] = dT = -k * (temp - temp_m)
+end
function true_sol(du, u, p, t)
- true_p = [log(2)/8.0, 100.0]
+ true_p = [log(2) / 8.0, 100.0]
newtons_cooling(du, u, true_p, t)
end
-
-ann = Chain(Dense(1,8,tanh), Dense(8,1,tanh))
+ann = Chain(Dense(1, 8, tanh), Dense(8, 1, tanh))
θ, re = Flux.destructure(ann)
-function dudt_(u,p,t)
- re(p)(u)[1].* u
+function dudt_(u, p, t)
+ re(p)(u)[1] .* u
end
function predict_adjoint(time_batch)
- _prob = remake(prob,u0=u0,p=θ)
- Array(solve(_prob, Tsit5(), saveat = time_batch))
+ _prob = remake(prob, u0 = u0, p = θ)
+ Array(solve(_prob, Tsit5(), saveat = time_batch))
end
function loss_adjoint(batch, time_batch)
@@ -35,14 +34,13 @@ function loss_adjoint(batch, time_batch)
sum(abs2, batch - pred)#, pred
end
-
u0 = Float32[200.0]
datasize = 30
tspan = (0.0f0, 3.0f0)
-t = range(tspan[1], tspan[2], length=datasize)
+t = range(tspan[1], tspan[2], length = datasize)
true_prob = ODEProblem(true_sol, u0, tspan)
-ode_data = Array(solve(true_prob, Tsit5(), saveat=t))
+ode_data = Array(solve(true_prob, Tsit5(), saveat = t))
prob = ODEProblem{false}(dudt_, u0, tspan, θ)
@@ -55,77 +53,81 @@ for (x, y) in train_loader
end
numEpochs = 300
-losses=[]
-cb() = begin
- l=loss_adjoint(ode_data, t)
- push!(losses, l)
- @show l
- pred=predict_adjoint(t)
- pl = scatter(t,ode_data[1,:],label="data", color=:black, ylim=(150,200))
- scatter!(pl,t,pred[1,:],label="prediction", color=:darkgreen)
- display(plot(pl))
- false
-end
-
-opt=ADAM(0.05)
-Flux.train!(loss_adjoint, Flux.params(θ), ncycle(train_loader,numEpochs), opt, cb=Flux.throttle(cb, 10))
+losses = []
+function cb()
+ begin
+ l = loss_adjoint(ode_data, t)
+ push!(losses, l)
+ @show l
+ pred = predict_adjoint(t)
+ pl = scatter(t, ode_data[1, :], label = "data", color = :black, ylim = (150, 200))
+ scatter!(pl, t, pred[1, :], label = "prediction", color = :darkgreen)
+ display(plot(pl))
+ false
+ end
+end
+
+opt = ADAM(0.05)
+Flux.train!(loss_adjoint, Flux.params(θ), ncycle(train_loader, numEpochs), opt,
+ cb = Flux.throttle(cb, 10))
#Now lets see how well it generalizes to new initial conditions
-starting_temp=collect(10:30:250)
-true_prob_func(u0)=ODEProblem(true_sol, [u0], tspan)
-color_cycle=palette(:tab10)
-pl=plot()
-for (j,temp) in enumerate(starting_temp)
- ode_test_sol = solve(ODEProblem(true_sol, [temp], (0.0f0,10.0f0)), Tsit5(), saveat=0.0:0.5:10.0)
- ode_nn_sol = solve(ODEProblem{false}(dudt_, [temp], (0.0f0,10.0f0), θ))
- scatter!(pl, ode_test_sol, var=(0,1), label="", color=color_cycle[j])
- plot!(pl, ode_nn_sol, var=(0,1), label="", color=color_cycle[j], lw=2.0)
-end
-display(pl)
+starting_temp = collect(10:30:250)
+true_prob_func(u0) = ODEProblem(true_sol, [u0], tspan)
+color_cycle = palette(:tab10)
+pl = plot()
+for (j, temp) in enumerate(starting_temp)
+ ode_test_sol = solve(ODEProblem(true_sol, [temp], (0.0f0, 10.0f0)), Tsit5(),
+ saveat = 0.0:0.5:10.0)
+ ode_nn_sol = solve(ODEProblem{false}(dudt_, [temp], (0.0f0, 10.0f0), θ))
+ scatter!(pl, ode_test_sol, var = (0, 1), label = "", color = color_cycle[j])
+ plot!(pl, ode_nn_sol, var = (0, 1), label = "", color = color_cycle[j], lw = 2.0)
+end
+display(pl)
title!("Neural ODE for Newton's Law of Cooling: Test Data")
xlabel!("Time")
-ylabel!("Temp")
+ylabel!("Temp")
```
-When training a neural network, we need to find the gradient with respect to our data set. There are three main ways to partition our data when using a training algorithm like gradient descent: stochastic, batching and mini-batching. Stochastic gradient descent trains on a single random data point each epoch. This allows for the neural network to better converge to the global minimum even on noisy data, but is computationally inefficient. Batch gradient descent trains on the whole data set each epoch and while computationally efficient is prone to converging to local minima. Mini-batching combines both of these advantages and by training on a small random "mini-batch" of the data each epoch can converge to the global minimum while remaining more computationally efficient than stochastic descent. Typically, we do this by randomly selecting subsets of the data each epoch and use this subset to train on. We can also pre-batch the data by creating an iterator holding these randomly selected batches before beginning to train. The proper size for the batch can be determined experimentally. Let us see how to do this with Julia.
+When training a neural network, we need to find the gradient with respect to our data set. There are three main ways to partition our data when using a training algorithm like gradient descent: stochastic, batching and mini-batching. Stochastic gradient descent trains on a single random data point each epoch. This allows for the neural network to better converge to the global minimum even on noisy data, but is computationally inefficient. Batch gradient descent trains on the whole data set each epoch and while computationally efficient is prone to converging to local minima. Mini-batching combines both of these advantages and by training on a small random "mini-batch" of the data each epoch can converge to the global minimum while remaining more computationally efficient than stochastic descent. Typically, we do this by randomly selecting subsets of the data each epoch and use this subset to train on. We can also pre-batch the data by creating an iterator holding these randomly selected batches before beginning to train. The proper size for the batch can be determined experimentally. Let us see how to do this with Julia.
-For this example, we will use a very simple ordinary differential equation, newtons law of cooling. We can represent this in Julia like so.
+For this example, we will use a very simple ordinary differential equation, newtons law of cooling. We can represent this in Julia like so.
```@example minibatch
using DifferentialEquations, Flux, Random, Plots
-using IterTools: ncycle
+using IterTools: ncycle
rng = Random.default_rng()
function newtons_cooling(du, u, p, t)
temp = u[1]
k, temp_m = p
- du[1] = dT = -k*(temp-temp_m)
- end
+ du[1] = dT = -k * (temp - temp_m)
+end
function true_sol(du, u, p, t)
- true_p = [log(2)/8.0, 100.0]
+ true_p = [log(2) / 8.0, 100.0]
newtons_cooling(du, u, true_p, t)
end
```
-Now we define a neural-network using a linear approximation with 1 hidden layer of 8 neurons.
+Now we define a neural-network using a linear approximation with 1 hidden layer of 8 neurons.
```@example minibatch
-ann = Chain(Dense(1,8,tanh), Dense(8,1,tanh))
+ann = Chain(Dense(1, 8, tanh), Dense(8, 1, tanh))
θ, re = Flux.destructure(ann)
-function dudt_(u,p,t)
- re(p)(u)[1].* u
+function dudt_(u, p, t)
+ re(p)(u)[1] .* u
end
```
-From here we build a loss function around it.
+From here we build a loss function around it.
```@example minibatch
function predict_adjoint(time_batch)
- _prob = remake(prob, u0=u0, p=θ)
- Array(solve(_prob, Tsit5(), saveat = time_batch))
+ _prob = remake(prob, u0 = u0, p = θ)
+ Array(solve(_prob, Tsit5(), saveat = time_batch))
end
function loss_adjoint(batch, time_batch)
@@ -134,16 +136,16 @@ function loss_adjoint(batch, time_batch)
end
```
-To add support for batches of size `k` we use `Flux.Data.DataLoader`. To use this we pass in the `ode_data` and `t` as the 'x' and 'y' data to batch respectively. The parameter `batchsize` controls the size of our batches. We check our implementation by iterating over the batched data.
+To add support for batches of size `k` we use `Flux.Data.DataLoader`. To use this we pass in the `ode_data` and `t` as the 'x' and 'y' data to batch respectively. The parameter `batchsize` controls the size of our batches. We check our implementation by iterating over the batched data.
```@example minibatch
u0 = Float32[200.0]
datasize = 30
tspan = (0.0f0, 3.0f0)
-t = range(tspan[1], tspan[2], length=datasize)
+t = range(tspan[1], tspan[2], length = datasize)
true_prob = ODEProblem(true_sol, u0, tspan)
-ode_data = Array(solve(true_prob, Tsit5(), saveat=t))
+ode_data = Array(solve(true_prob, Tsit5(), saveat = t))
prob = ODEProblem{false}(dudt_, u0, tspan, θ)
@@ -156,41 +158,45 @@ for (x, y) in train_loader
end
```
-Now we train the neural network with a user-defined call back function to display loss and the graphs with a maximum of 300 epochs.
+Now we train the neural network with a user-defined call back function to display loss and the graphs with a maximum of 300 epochs.
```@example minibatch
numEpochs = 300
-losses=[]
-cb() = begin
- l=loss_adjoint(ode_data, t)
- push!(losses, l)
- @show l
- pred=predict_adjoint(t)
- pl = scatter(t,ode_data[1,:],label="data", color=:black, ylim=(150,200))
- scatter!(pl,t,pred[1,:],label="prediction", color=:darkgreen)
- display(plot(pl))
- false
-end
-
-opt=ADAM(0.05)
-Flux.train!(loss_adjoint, Flux.params(θ), ncycle(train_loader,numEpochs), opt, cb=Flux.throttle(cb, 10))
+losses = []
+function cb()
+ begin
+ l = loss_adjoint(ode_data, t)
+ push!(losses, l)
+ @show l
+ pred = predict_adjoint(t)
+ pl = scatter(t, ode_data[1, :], label = "data", color = :black, ylim = (150, 200))
+ scatter!(pl, t, pred[1, :], label = "prediction", color = :darkgreen)
+ display(plot(pl))
+ false
+ end
+end
+
+opt = ADAM(0.05)
+Flux.train!(loss_adjoint, Flux.params(θ), ncycle(train_loader, numEpochs), opt,
+ cb = Flux.throttle(cb, 10))
```
-Finally, we can see how well our trained network will generalize to new initial conditions.
+Finally, we can see how well our trained network will generalize to new initial conditions.
```@example minibatch
-starting_temp=collect(10:30:250)
-true_prob_func(u0)=ODEProblem(true_sol, [u0], tspan)
-color_cycle=palette(:tab10)
-pl=plot()
-for (j,temp) in enumerate(starting_temp)
- ode_test_sol = solve(ODEProblem(true_sol, [temp], (0.0f0,10.0f0)), Tsit5(), saveat=0.0:0.5:10.0)
- ode_nn_sol = solve(ODEProblem{false}(dudt_, [temp], (0.0f0,10.0f0), θ))
- scatter!(pl, ode_test_sol, var=(0,1), label="", color=color_cycle[j])
- plot!(pl, ode_nn_sol, var=(0,1), label="", color=color_cycle[j], lw=2.0)
-end
-display(pl)
+starting_temp = collect(10:30:250)
+true_prob_func(u0) = ODEProblem(true_sol, [u0], tspan)
+color_cycle = palette(:tab10)
+pl = plot()
+for (j, temp) in enumerate(starting_temp)
+ ode_test_sol = solve(ODEProblem(true_sol, [temp], (0.0f0, 10.0f0)), Tsit5(),
+ saveat = 0.0:0.5:10.0)
+ ode_nn_sol = solve(ODEProblem{false}(dudt_, [temp], (0.0f0, 10.0f0), θ))
+ scatter!(pl, ode_test_sol, var = (0, 1), label = "", color = color_cycle[j])
+ plot!(pl, ode_nn_sol, var = (0, 1), label = "", color = color_cycle[j], lw = 2.0)
+end
+display(pl)
title!("Neural ODE for Newton's Law of Cooling: Test Data")
xlabel!("Time")
-ylabel!("Temp")
+ylabel!("Temp")
```
diff --git a/docs/src/examples/neural_ode/neural_gde.md b/docs/src/examples/neural_ode/neural_gde.md
index fccc086eb..9ada8111b 100644
--- a/docs/src/examples/neural_ode/neural_gde.md
+++ b/docs/src/examples/neural_ode/neural_gde.md
@@ -25,15 +25,15 @@ dataset = Cora();
# Preprocess the data and compute adjacency matrix
classes = dataset.metadata["classes"]
g = mldataset2gnngraph(dataset) |> device
-onehotbatch(data,labels)= device(labels).==reshape(data, 1,size(data)...)
-onecold(y) = map(argmax,eachcol(y))
+onehotbatch(data, labels) = device(labels) .== reshape(data, 1, size(data)...)
+onecold(y) = map(argmax, eachcol(y))
X = g.ndata.features
y = onehotbatch(g.ndata.targets, classes) # a dense matrix is not the optimal, but we don't want to use Flux here
-Ã = normalized_adjacency(g, add_self_loops=true) |> device
+Ã = normalized_adjacency(g, add_self_loops = true) |> device
(; train_mask, val_mask, test_mask) = g.ndata
-ytrain = y[:,train_mask]
+ytrain = y[:, train_mask]
# Model and Data Configuration
nin = size(X, 1)
@@ -42,7 +42,7 @@ nout = length(classes)
epochs = 20
# Define the graph neural network
-struct ExplicitGCNConv{F1,F2,F3,F4} <: AbstractExplicitLayer
+struct ExplicitGCNConv{F1, F2, F3, F4} <: AbstractExplicitLayer
in_chs::Int
out_chs::Int
activation::F1
@@ -58,18 +58,18 @@ function Base.show(io::IO, l::ExplicitGCNConv)
end
function initialparameters(rng::AbstractRNG, d::ExplicitGCNConv)
- return (weight=d.init_weight(rng, d.out_chs, d.in_chs),
- bias=d.init_bias(rng, d.out_chs, 1))
+ return (weight = d.init_weight(rng, d.out_chs, d.in_chs),
+ bias = d.init_bias(rng, d.out_chs, 1))
end
initialstates(rng::AbstractRNG, d::ExplicitGCNConv) = (Ã = d.init_Ã(),)
-
-function ExplicitGCNConv(Ã, ch::Pair{Int,Int}, activation = identity;
- init_weight=glorot_normal, init_bias=zeros32)
- init_Ã = ()->copy(Ã)
- return ExplicitGCNConv{typeof(activation), typeof(init_Ã), typeof(init_weight), typeof(init_bias)}(first(ch), last(ch), activation,
- init_Ã, init_weight, init_bias)
+function ExplicitGCNConv(Ã, ch::Pair{Int, Int}, activation = identity;
+ init_weight = glorot_normal, init_bias = zeros32)
+ init_Ã = () -> copy(Ã)
+ return ExplicitGCNConv{typeof(activation), typeof(init_Ã), typeof(init_weight),
+ typeof(init_bias)}(first(ch), last(ch), activation,
+ init_Ã, init_weight, init_bias)
end
function (l::ExplicitGCNConv)(x::AbstractMatrix, ps, st::NamedTuple)
@@ -79,9 +79,9 @@ end
# Define the Neural GDE
function diffeqsol_to_array(x::ODESolution{T, N, <:AbstractVector{<:CuArray}}) where {T, N}
- return dropdims(gpu(x); dims=3)
+ return dropdims(gpu(x); dims = 3)
end
-diffeqsol_to_array(x::ODESolution) = dropdims(Array(x); dims=3)
+diffeqsol_to_array(x::ODESolution) = dropdims(Array(x); dims = 3)
# make NeuralODE work with Lux.Chain
# remove this once https://github.com/SciML/DiffEqFlux.jl/issues/727 is fixed
@@ -91,7 +91,7 @@ initialstates(rng::AbstractRNG, node::NeuralODE) = initialstates(rng, node.model
gnn = Chain(ExplicitGCNConv(Ã, nhidden => nhidden, relu),
ExplicitGCNConv(Ã, nhidden => nhidden, relu))
-node = NeuralODE(gnn, (0.f0, 1.f0), Tsit5(), save_everystep = false,
+node = NeuralODE(gnn, (0.0f0, 1.0f0), Tsit5(), save_everystep = false,
reltol = 1e-3, abstol = 1e-3, save_start = false)
model = Chain(ExplicitGCNConv(Ã, nin => nhidden, relu),
@@ -100,18 +100,18 @@ model = Chain(ExplicitGCNConv(Ã, nin => nhidden, relu),
Dense(nhidden, nout))
# Loss
-logitcrossentropy(ŷ, y) = mean(-sum(y .* logsoftmax(ŷ); dims=1))
+logitcrossentropy(ŷ, y) = mean(-sum(y .* logsoftmax(ŷ); dims = 1))
function loss(x, y, mask, model, ps, st)
ŷ, st = model(x, ps, st)
- return logitcrossentropy(ŷ[:,mask], y), st
+ return logitcrossentropy(ŷ[:, mask], y), st
end
function eval_loss_accuracy(X, y, mask, model, ps, st)
ŷ, _ = model(X, ps, st)
- l = logitcrossentropy(ŷ[:,mask], y[:,mask])
- acc = mean(onecold(ŷ[:,mask]) .== onecold(y[:,mask]))
- return (loss = round(l, digits=4), acc = round(acc*100, digits=2))
+ l = logitcrossentropy(ŷ[:, mask], y[:, mask])
+ acc = mean(onecold(ŷ[:, mask]) .== onecold(y[:, mask]))
+ return (loss = round(l, digits = 4), acc = round(acc * 100, digits = 2))
end
# Training
@@ -126,11 +126,11 @@ function train()
## Optimizer
opt = Optimisers.ADAM(0.01f0)
- st_opt = Optimisers.setup(opt,ps)
+ st_opt = Optimisers.setup(opt, ps)
## Training Loop
for _ in 1:epochs
- (l,st), back = pullback(p->loss(X, ytrain, train_mask, model, p, st), ps)
+ (l, st), back = pullback(p -> loss(X, ytrain, train_mask, model, p, st), ps)
gs = back((one(l), nothing))[1]
st_opt, ps = Optimisers.update(st_opt, ps, gs)
@show eval_loss_accuracy(X, y, val_mask, model, ps, st)
@@ -175,19 +175,21 @@ Convert the data to `GNNGraph` and get the adjacency matrix from the graph `g`.
```julia
classes = dataset.metadata["classes"]
g = mldataset2gnngraph(dataset) |> device
-onehotbatch(data,labels)= device(labels).==reshape(data, 1,size(data)...)
-onecold(y) = map(argmax,eachcol(y))
+onehotbatch(data, labels) = device(labels) .== reshape(data, 1, size(data)...)
+onecold(y) = map(argmax, eachcol(y))
X = g.ndata.features
y = onehotbatch(g.ndata.targets, classes) # a dense matrix is not the optimal, but we don't want to use Flux here
-Ã = normalized_adjacency(g, add_self_loops=true) |> device
+Ã = normalized_adjacency(g, add_self_loops = true) |> device
```
+
### Training Data
GNNs operate on an entire graph, so we can't do any sort of minibatching here. We predict the entire dataset, but train the model in a semi-supervised learning fashion.
+
```julia
(; train_mask, val_mask, test_mask) = g.ndata
-ytrain = y[:,train_mask]
+ytrain = y[:, train_mask]
```
## Model and Data Configuration
@@ -200,13 +202,13 @@ nhidden = 16
nout = length(classes)
epochs = 20
```
+
## Define the Graph Neural Network
Here, we define a type of graph neural networks called `GCNConv`. We use the name `ExplicitGCNConv` to avoid naming conflicts with `GraphNeuralNetworks`. For more information on defining a layer with `Lux`, please consult to the [doc](http://lux.csail.mit.edu/dev/introduction/overview/#AbstractExplicitLayer-API).
-
```julia
-struct ExplicitGCNConv{F1,F2,F3} <: AbstractExplicitLayer
+struct ExplicitGCNConv{F1, F2, F3} <: AbstractExplicitLayer
Ã::AbstractMatrix # nomalized_adjacency matrix
in_chs::Int
out_chs::Int
@@ -222,14 +224,18 @@ function Base.show(io::IO, l::ExplicitGCNConv)
end
function initialparameters(rng::AbstractRNG, d::ExplicitGCNConv)
- return (weight=d.init_weight(rng, d.out_chs, d.in_chs),
- bias=d.init_bias(rng, d.out_chs, 1))
+ return (weight = d.init_weight(rng, d.out_chs, d.in_chs),
+ bias = d.init_bias(rng, d.out_chs, 1))
end
-function ExplicitGCNConv(Ã, ch::Pair{Int,Int}, activation = identity;
- init_weight=glorot_normal, init_bias=zeros32)
- return ExplicitGCNConv{typeof(activation), typeof(init_weight), typeof(init_bias)}(Ã, first(ch), last(ch), activation,
- init_weight, init_bias)
+function ExplicitGCNConv(Ã, ch::Pair{Int, Int}, activation = identity;
+ init_weight = glorot_normal, init_bias = zeros32)
+ return ExplicitGCNConv{typeof(activation), typeof(init_weight), typeof(init_bias)}(Ã,
+ first(ch),
+ last(ch),
+ activation,
+ init_weight,
+ init_bias)
end
function (l::ExplicitGCNConv)(x::AbstractMatrix, ps, st::NamedTuple)
@@ -244,14 +250,14 @@ Let us now define the final model. We will use two GNN layers for approximating
```julia
function diffeqsol_to_array(x::ODESolution{T, N, <:AbstractVector{<:CuArray}}) where {T, N}
- return dropdims(gpu(x); dims=3)
+ return dropdims(gpu(x); dims = 3)
end
-diffeqsol_to_array(x::ODESolution) = dropdims(Array(x); dims=3)
+diffeqsol_to_array(x::ODESolution) = dropdims(Array(x); dims = 3)
gnn = Chain(ExplicitGCNConv(Ã, nhidden => nhidden, relu),
ExplicitGCNConv(Ã, nhidden => nhidden, relu))
-node = NeuralODE(gnn, (0.f0, 1.f0), Tsit5(), save_everystep = false,
+node = NeuralODE(gnn, (0.0f0, 1.0f0), Tsit5(), save_everystep = false,
reltol = 1e-3, abstol = 1e-3, save_start = false)
model = Chain(ExplicitGCNConv(Ã, nin => nhidden, relu),
@@ -267,23 +273,25 @@ model = Chain(ExplicitGCNConv(Ã, nin => nhidden, relu),
We shall be using the standard categorical crossentropy loss function, which is used for multiclass classification tasks.
```julia
-logitcrossentropy(ŷ, y) = mean(-sum(y .* logsoftmax(ŷ); dims=1))
+logitcrossentropy(ŷ, y) = mean(-sum(y .* logsoftmax(ŷ); dims = 1))
function loss(x, y, mask, model, ps, st)
ŷ, st = model(x, ps, st)
- return logitcrossentropy(ŷ[:,mask], y), st
+ return logitcrossentropy(ŷ[:, mask], y), st
end
function eval_loss_accuracy(X, y, mask, model, ps, st)
ŷ, _ = model(X, ps, st)
- l = logitcrossentropy(ŷ[:,mask], y[:,mask])
- acc = mean(onecold(ŷ[:,mask]) .== onecold(y[:,mask]))
- return (loss = round(l, digits=4), acc = round(acc*100, digits=2))
+ l = logitcrossentropy(ŷ[:, mask], y[:, mask])
+ acc = mean(onecold(ŷ[:, mask]) .== onecold(y[:, mask]))
+ return (loss = round(l, digits = 4), acc = round(acc * 100, digits = 2))
end
```
### Setup Model
+
We need to manually set up our mode with `Lux`, and convert the parameters to `ComponentArray` so that they can work well with sensitivity algorithms.
+
```julia
rng = Random.default_rng()
Random.seed!(rng, 0)
@@ -292,13 +300,14 @@ ps, st = Lux.setup(rng, model)
ps = ComponentArray(ps) |> device
st = st |> device
```
+
### Optimizer
For this task, we will be using the `ADAM` optimizer with a learning rate of `0.01`.
```julia
opt = Optimisers.Adam(0.01f0)
-st_opt = Optimisers.setup(opt,ps)
+st_opt = Optimisers.setup(opt, ps)
```
## Training Loop
@@ -307,7 +316,7 @@ Finally, we use the package `Optimisers` to learn the parameters `ps`. We run th
```julia
for _ in 1:epochs
- (l,st), back = pullback(p->loss(X, ytrain, train_mask, model, p, st), ps)
+ (l, st), back = pullback(p -> loss(X, ytrain, train_mask, model, p, st), ps)
gs = back((one(l), nothing))[1]
st_opt, ps = Optimisers.update(st_opt, ps, gs)
@show eval_loss_accuracy(X, y, val_mask, model, ps, st)
diff --git a/docs/src/examples/neural_ode/neural_ode_flux.md b/docs/src/examples/neural_ode/neural_ode_flux.md
index 517746b7b..ff82a38dc 100644
--- a/docs/src/examples/neural_ode/neural_ode_flux.md
+++ b/docs/src/examples/neural_ode/neural_ode_flux.md
@@ -12,52 +12,52 @@ example of optimizing `u0` and `p`.
```@example neuralode1
using OrdinaryDiffEq, SciMLSensitivity, Flux, Plots
-u0 = Float32[2.; 0.]
+u0 = Float32[2.0; 0.0]
datasize = 30
-tspan = (0.0f0,1.5f0)
+tspan = (0.0f0, 1.5f0)
-function trueODEfunc(du,u,p,t)
+function trueODEfunc(du, u, p, t)
true_A = [-0.1 2.0; -2.0 -0.1]
- du .= ((u.^3)'true_A)'
+ du .= ((u .^ 3)'true_A)'
end
-t = range(tspan[1],tspan[2],length=datasize)
-prob = ODEProblem(trueODEfunc,u0,tspan)
-ode_data = Array(solve(prob,Tsit5(),saveat=t))
+t = range(tspan[1], tspan[2], length = datasize)
+prob = ODEProblem(trueODEfunc, u0, tspan)
+ode_data = Array(solve(prob, Tsit5(), saveat = t))
-dudt2 = Flux.Chain(x -> x.^3,
- Flux.Dense(2,50,tanh),
- Flux.Dense(50,2))
-p,re = Flux.destructure(dudt2) # use this p as the initial condition!
-dudt(u,p,t) = re(p)(u) # need to restrcture for backprop!
-prob = ODEProblem(dudt,u0,tspan)
+dudt2 = Flux.Chain(x -> x .^ 3,
+ Flux.Dense(2, 50, tanh),
+ Flux.Dense(50, 2))
+p, re = Flux.destructure(dudt2) # use this p as the initial condition!
+dudt(u, p, t) = re(p)(u) # need to restrcture for backprop!
+prob = ODEProblem(dudt, u0, tspan)
function predict_n_ode()
- Array(solve(prob,Tsit5(),u0=u0,p=p,saveat=t))
+ Array(solve(prob, Tsit5(), u0 = u0, p = p, saveat = t))
end
function loss_n_ode()
pred = predict_n_ode()
- loss = sum(abs2,ode_data .- pred)
+ loss = sum(abs2, ode_data .- pred)
loss
end
loss_n_ode() # n_ode.p stores the initial parameters of the neural ODE
-callback = function (;doplot=false) #callback function to observe training
- pred = predict_n_ode()
- display(sum(abs2,ode_data .- pred))
- # plot current prediction against data
- pl = scatter(t,ode_data[1,:],label="data")
- scatter!(pl,t,pred[1,:],label="prediction")
- display(plot(pl))
- return false
+callback = function (; doplot = false) #callback function to observe training
+ pred = predict_n_ode()
+ display(sum(abs2, ode_data .- pred))
+ # plot current prediction against data
+ pl = scatter(t, ode_data[1, :], label = "data")
+ scatter!(pl, t, pred[1, :], label = "prediction")
+ display(plot(pl))
+ return false
end
# Display the ODE with the initial parameter values.
callback()
data = Iterators.repeated((), 1000)
-res1 = Flux.train!(loss_n_ode, Flux.params(u0,p), data, ADAM(0.05), cb = callback)
+res1 = Flux.train!(loss_n_ode, Flux.params(u0, p), data, ADAM(0.05), cb = callback)
callback()
```
@@ -69,7 +69,7 @@ the `Flux.destructure` function. In this case, if `dudt` is a Flux
chain, then:
```julia
-p,re = Flux.destructure(chain)
+p, re = Flux.destructure(chain)
```
returns `p` which is the vector of parameters for the chain and `re` which is
@@ -83,69 +83,70 @@ Notice that Optimization.jl works on a vector input, so we have to concatenate `
and `p` and then in the loss function split to the pieces.
```@example neuralode2
-using Flux, OrdinaryDiffEq, SciMLSensitivity, Optimization, OptimizationOptimisers, OptimizationNLopt, Plots
+using Flux, OrdinaryDiffEq, SciMLSensitivity, Optimization, OptimizationOptimisers,
+ OptimizationNLopt, Plots
-u0 = Float32[2.; 0.]
+u0 = Float32[2.0; 0.0]
datasize = 30
-tspan = (0.0f0,1.5f0)
+tspan = (0.0f0, 1.5f0)
-function trueODEfunc(du,u,p,t)
+function trueODEfunc(du, u, p, t)
true_A = [-0.1 2.0; -2.0 -0.1]
- du .= ((u.^3)'true_A)'
+ du .= ((u .^ 3)'true_A)'
end
-t = range(tspan[1],tspan[2],length=datasize)
-prob = ODEProblem(trueODEfunc,u0,tspan)
-ode_data = Array(solve(prob,Tsit5(),saveat=t))
+t = range(tspan[1], tspan[2], length = datasize)
+prob = ODEProblem(trueODEfunc, u0, tspan)
+ode_data = Array(solve(prob, Tsit5(), saveat = t))
-dudt2 = Flux.Chain(x -> x.^3,
- Flux.Dense(2,50,tanh),
- Flux.Dense(50,2))
-p,re = Flux.destructure(dudt2) # use this p as the initial condition!
-dudt(u,p,t) = re(p)(u) # need to restrcture for backprop!
-prob = ODEProblem(dudt,u0,tspan)
+dudt2 = Flux.Chain(x -> x .^ 3,
+ Flux.Dense(2, 50, tanh),
+ Flux.Dense(50, 2))
+p, re = Flux.destructure(dudt2) # use this p as the initial condition!
+dudt(u, p, t) = re(p)(u) # need to restrcture for backprop!
+prob = ODEProblem(dudt, u0, tspan)
-θ = [u0;p] # the parameter vector to optimize
+θ = [u0; p] # the parameter vector to optimize
function predict_n_ode(θ)
- Array(solve(prob,Tsit5(),u0=θ[1:2],p=θ[3:end],saveat=t))
+ Array(solve(prob, Tsit5(), u0 = θ[1:2], p = θ[3:end], saveat = t))
end
function loss_n_ode(θ)
pred = predict_n_ode(θ)
- loss = sum(abs2,ode_data .- pred)
- loss,pred
+ loss = sum(abs2, ode_data .- pred)
+ loss, pred
end
loss_n_ode(θ)
-callback = function (θ,l,pred;doplot=false) #callback function to observe training
- display(l)
- # plot current prediction against data
- pl = scatter(t,ode_data[1,:],label="data")
- scatter!(pl,t,pred[1,:],label="prediction")
- display(plot(pl))
- return false
+callback = function (θ, l, pred; doplot = false) #callback function to observe training
+ display(l)
+ # plot current prediction against data
+ pl = scatter(t, ode_data[1, :], label = "data")
+ scatter!(pl, t, pred[1, :], label = "prediction")
+ display(plot(pl))
+ return false
end
# Display the ODE with the initial parameter values.
-callback(θ,loss_n_ode(θ)...)
+callback(θ, loss_n_ode(θ)...)
# use Optimization.jl to solve the problem
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((p,_)->loss_n_ode(p), adtype)
+optf = Optimization.OptimizationFunction((p, _) -> loss_n_ode(p), adtype)
optprob = Optimization.OptimizationProblem(optf, θ)
result_neuralode = Optimization.solve(optprob,
- OptimizationOptimisers.Adam(0.05),
- callback = callback,
- maxiters = 300)
+ OptimizationOptimisers.Adam(0.05),
+ callback = callback,
+ maxiters = 300)
-optprob2 = remake(optprob,u0 = result_neuralode.u)
+optprob2 = remake(optprob, u0 = result_neuralode.u)
result_neuralode2 = Optimization.solve(optprob2,
- NLopt.LD_LBFGS(),
- callback = callback)
+ NLopt.LD_LBFGS(),
+ callback = callback)
```
Notice that the advantage of this format is that we can use Optim's optimizers, like
diff --git a/docs/src/examples/neural_ode/simplechains.md b/docs/src/examples/neural_ode/simplechains.md
index 50e7580e6..c2dfa7da8 100644
--- a/docs/src/examples/neural_ode/simplechains.md
+++ b/docs/src/examples/neural_ode/simplechains.md
@@ -7,7 +7,8 @@
First, we'll need data for training the NeuralODE, which can be obtained by solving the ODE `u' = f(u,p,t)` numerically using the SciML ecosystem in Julia.
```@example sc_neuralode
-using SimpleChains, StaticArrays, OrdinaryDiffEq, SciMLSensitivity, Optimization, OptimizationFlux, Plots
+using SimpleChains, StaticArrays, OrdinaryDiffEq, SciMLSensitivity, Optimization,
+ OptimizationFlux, Plots
u0 = @SArray Float32[2.0, 0.0]
datasize = 30
@@ -16,7 +17,7 @@ tsteps = range(tspan[1], tspan[2], length = datasize)
function trueODE(u, p, t)
true_A = @SMatrix Float32[-0.1 2.0; -2.0 -0.1]
- ((u.^3)'true_A)'
+ ((u .^ 3)'true_A)'
end
prob = ODEProblem(trueODE, u0, tspan)
@@ -28,16 +29,14 @@ data = Array(solve(prob, Tsit5(), saveat = tsteps))
Next, we set up a small neural network. It will be trained to output the derivative of the solution at each time step given the value of the solution at the previous time step, and the parameters of the network. Thus, we are treating the neural network as a function `f(u,p,t)`. The difference is that instead of relying on knowing the exact equation for the ODE, we get to solve it only with the data.
```@example sc_neuralode
-sc = SimpleChain(
- static(2),
- Activation(x -> x.^3),
- TurboDense{true}(tanh, static(50)),
- TurboDense{true}(identity, static(2))
- )
+sc = SimpleChain(static(2),
+ Activation(x -> x .^ 3),
+ TurboDense{true}(tanh, static(50)),
+ TurboDense{true}(identity, static(2)))
p_nn = SimpleChains.init_params(sc)
-f(u,p,t) = sc(u,p)
+f(u, p, t) = sc(u, p)
```
## NeuralODE, Prediction and Loss
@@ -48,7 +47,8 @@ Now instead of the function `trueODE(u,p,t)` in the first code block, we pass th
prob_nn = ODEProblem(f, u0, tspan)
function predict_neuralode(p)
- Array(solve(prob_nn, Tsit5();p=p,saveat=tsteps,sensealg=QuadratureAdjoint(autojacvec=ZygoteVJP())))
+ Array(solve(prob_nn, Tsit5(); p = p, saveat = tsteps,
+ sensealg = QuadratureAdjoint(autojacvec = ZygoteVJP())))
end
function loss_neuralode(p)
@@ -67,16 +67,17 @@ The adjoint of a neural ODE can be calculated through the various AD algorithms
```@example sc_neuralode
callback = function (p, l, pred; doplot = true)
display(l)
- plt = scatter(tsteps, data[1,:],label="data")
- scatter!(plt, tsteps, pred[1,:], label = "prediction")
+ plt = scatter(tsteps, data[1, :], label = "data")
+ scatter!(plt, tsteps, pred[1, :], label = "prediction")
if doplot
display(plot(plt))
end
return false
end
-optf = Optimization.OptimizationFunction((x,p)->loss_neuralode(x), Optimization.AutoZygote())
+optf = Optimization.OptimizationFunction((x, p) -> loss_neuralode(x),
+ Optimization.AutoZygote())
optprob = Optimization.OptimizationProblem(optf, p_nn)
-res = Optimization.solve(optprob, ADAM(0.05),callback=callback,maxiters=300)
-```
\ No newline at end of file
+res = Optimization.solve(optprob, ADAM(0.05), callback = callback, maxiters = 300)
+```
diff --git a/docs/src/examples/ode/exogenous_input.md b/docs/src/examples/ode/exogenous_input.md
index 2bbdc4805..9d5588497 100644
--- a/docs/src/examples/ode/exogenous_input.md
+++ b/docs/src/examples/ode/exogenous_input.md
@@ -8,9 +8,9 @@ use the form
```julia
I(t) = t^2
-function f(du,u,p,t)
- du[1] = I(t)
- du[2] = u[1]
+function f(du, u, p, t)
+ du[1] = I(t)
+ du[2] = u[1]
end
```
@@ -18,12 +18,12 @@ so that `I(t)` is an exogenous input signal into `f`. Another form that could be
useful is a closure. For example:
```julia
-function f(du,u,p,t,I)
- du[1] = I(t)
- du[2] = u[1]
+function f(du, u, p, t, I)
+ du[1] = I(t)
+ du[2] = u[1]
end
-_f(du,u,p,t) = f(du,u,p,t,x -> x^2)
+_f(du, u, p, t) = f(du, u, p, t, x -> x^2)
```
which encloses an extra argument into `f` so that `_f` is now the interface-compliant
@@ -40,61 +40,62 @@ In the following example, a discrete exogenous input signal `ex` is defined and
used as an input into the neural network of a neural ODE system.
```@example exogenous
-using DifferentialEquations, Lux, DiffEqFlux, Optimization, OptimizationPolyalgorithms, OptimizationFlux, Plots, Random
+using DifferentialEquations, Lux, DiffEqFlux, Optimization, OptimizationPolyalgorithms,
+ OptimizationFlux, Plots, Random
rng = Random.default_rng()
tspan = (0.1f0, Float32(10.0))
tsteps = range(tspan[1], tspan[2], length = 100)
t_vec = collect(tsteps)
-ex = vec(ones(Float32,length(tsteps), 1))
+ex = vec(ones(Float32, length(tsteps), 1))
f(x) = (atan(8.0 * x - 4.0) + atan(4.0)) / (2.0 * atan(4.0))
function hammerstein_system(u)
- y= zeros(size(u))
+ y = zeros(size(u))
for k in 2:length(u)
- y[k] = 0.2 * f(u[k-1]) + 0.8 * y[k-1]
+ y[k] = 0.2 * f(u[k - 1]) + 0.8 * y[k - 1]
end
return y
end
y = Float32.(hammerstein_system(ex))
-plot(collect(tsteps), y, ticks=:native)
+plot(collect(tsteps), y, ticks = :native)
-nn_model = Lux.Chain(Lux.Dense(2,8, tanh), Lux.Dense(8, 1))
-p_model,st = Lux.setup(rng, nn_model)
+nn_model = Lux.Chain(Lux.Dense(2, 8, tanh), Lux.Dense(8, 1))
+p_model, st = Lux.setup(rng, nn_model)
u0 = Float32.([0.0])
function dudt(u, p, t)
global st
#input_val = u_vals[Int(round(t*10)+1)]
- out,st = nn_model(vcat(u[1], ex[Int(round(10*0.1))]), p, st)
+ out, st = nn_model(vcat(u[1], ex[Int(round(10 * 0.1))]), p, st)
return out
end
-prob = ODEProblem(dudt,u0,tspan,nothing)
+prob = ODEProblem(dudt, u0, tspan, nothing)
function predict_neuralode(p)
- _prob = remake(prob,p=p)
- Array(solve(_prob, Tsit5(), saveat=tsteps, abstol = 1e-8, reltol = 1e-6))
+ _prob = remake(prob, p = p)
+ Array(solve(_prob, Tsit5(), saveat = tsteps, abstol = 1e-8, reltol = 1e-6))
end
function loss(p)
sol = predict_neuralode(p)
N = length(sol)
- return sum(abs2.(y[1:N] .- sol'))/N
+ return sum(abs2.(y[1:N] .- sol')) / N
end
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, Lux.ComponentArray(p_model))
-res0 = Optimization.solve(optprob, PolyOpt(),maxiters=100)
+res0 = Optimization.solve(optprob, PolyOpt(), maxiters = 100)
sol = predict_neuralode(res0.u)
-plot(tsteps,sol')
+plot(tsteps, sol')
N = length(sol)
-scatter!(tsteps,y[1:N])
+scatter!(tsteps, y[1:N])
```

diff --git a/docs/src/examples/ode/prediction_error_method.md b/docs/src/examples/ode/prediction_error_method.md
index 4316ab9c1..93726c445 100644
--- a/docs/src/examples/ode/prediction_error_method.md
+++ b/docs/src/examples/ode/prediction_error_method.md
@@ -3,54 +3,56 @@
When identifying linear systems from noisy data, the prediction-error method [^Ljung] is close to a gold standard when it comes to the quality of the models it produces, but is also one of the computationally more expensive methods due to its reliance on iterative, gradient-based estimation. When we are identifying nonlinear models, we typically do not have the luxury of closed-form, non-iterative solutions, while PEM is easier to adapt to the nonlinear setting.[^Larsson]
Fundamentally, PEM changes the problem from minimizing a loss based on the simulation performance, to minimizing a loss based on shorter-term predictions. There are several benefits of doing so, and this example will highlight two:
-- The loss is often easier to optimize.
-- In addition to an accurate simulator, you also obtain a prediction for the system.
-- With PEM, it's possible to estimate *disturbance models*.
-The last point will not be illustrated in this tutorial, but we will briefly expand upon it here. Gaussian, zero-mean measurement noise is usually not very hard to handle. Disturbances that affect the state of the system may, however, cause all sorts of havoc on the estimate. Consider wind affecting an aircraft, deriving a statistical and dynamical model of the wind may be doable, but unless you measure the exact wind affecting the aircraft, making use of the model during parameter estimation is impossible. The wind is an *unmeasured load disturbance* that affects the state of the system through its own dynamics model. Using the techniques illustrated in this tutorial, it's possible to estimate the influence of the wind during the experiment that generated the data and reduce or eliminate the bias it otherwise causes in the parameter estimates.
+ - The loss is often easier to optimize.
+ - In addition to an accurate simulator, you also obtain a prediction for the system.
+ - With PEM, it's possible to estimate *disturbance models*.
+
+The last point will not be illustrated in this tutorial, but we will briefly expand upon it here. Gaussian, zero-mean measurement noise is usually not very hard to handle. Disturbances that affect the state of the system may, however, cause all sorts of havoc on the estimate. Consider wind affecting an aircraft, deriving a statistical and dynamical model of the wind may be doable, but unless you measure the exact wind affecting the aircraft, making use of the model during parameter estimation is impossible. The wind is an *unmeasured load disturbance* that affects the state of the system through its own dynamics model. Using the techniques illustrated in this tutorial, it's possible to estimate the influence of the wind during the experiment that generated the data and reduce or eliminate the bias it otherwise causes in the parameter estimates.
We will start by illustrating a common problem with simulation-error minimization. Imagine a pendulum with unknown length that is to be estimated. A small error in the pendulum length causes the frequency of oscillation to change. Over sufficiently large horizon, two sinusoidal signals with different frequencies become close to orthogonal to each other. If some form of squared-error loss is used, the loss landscape will be horribly non-convex in this case, indeed, we will illustrate exactly this below.
Another case that poses a problem for simulation-error estimation is when the system is unstable or chaotic. A small error in either the initial condition or the parameters may cause the simulation error to diverge and its gradient to become meaningless.
-In both of these examples, we may make use of measurements we have of the evolution of the system to prevent the simulation error from diverging. For instance, if we have measured the angle of the pendulum, we can make use of this measurement to adjust the angle during the simulation to make sure it stays close to the measured angle. Instead of performing a pure simulation, we instead say that we *predict* the state a while forward in time, given all the measurements until the current time point. By minimizing this prediction rather than the pure simulation, we can often prevent the model error from diverging even though we have a poor initial guess.
+In both of these examples, we may make use of measurements we have of the evolution of the system to prevent the simulation error from diverging. For instance, if we have measured the angle of the pendulum, we can make use of this measurement to adjust the angle during the simulation to make sure it stays close to the measured angle. Instead of performing a pure simulation, we instead say that we *predict* the state a while forward in time, given all the measurements until the current time point. By minimizing this prediction rather than the pure simulation, we can often prevent the model error from diverging even though we have a poor initial guess.
-We start by defining a model of the pendulum. The model takes a parameter $L$ corresponding to the length of the pendulum.
+We start by defining a model of the pendulum. The model takes a parameter $L$ corresponding to the length of the pendulum.
```@example PEM
-using DifferentialEquations, Optimization, OptimizationPolyalgorithms, Plots, Statistics, DataInterpolations, ForwardDiff
+using DifferentialEquations, Optimization, OptimizationPolyalgorithms, Plots, Statistics,
+ DataInterpolations, ForwardDiff
tspan = (0.1, 20.0)
tsteps = range(tspan[1], tspan[2], length = 1000)
u0 = [0.0, 3.0] # Initial angle and angular velocity
-function simulator(du,u,p,t) # Pendulum dynamics
+function simulator(du, u, p, t) # Pendulum dynamics
g = 9.82 # Gravitational constant
L = p isa Number ? p : p[1] # Length of the pendulum
- gL = g/L
- θ = u[1]
+ gL = g / L
+ θ = u[1]
dθ = u[2]
du[1] = dθ
du[2] = -gL * sin(θ)
end
```
+
We assume that the true length of the pendulum is $L = 1$, and generate some data from this system.
```@example PEM
-prob = ODEProblem(simulator,u0,tspan,1.0) # Simulate with L = 1
-sol = solve(prob, Tsit5(), saveat=tsteps, abstol = 1e-8, reltol = 1e-8)
-y = sol[1,:] # This is the data we have available for parameter estimation
-plot(y, title="Pendulum simulation", label="angle")
+prob = ODEProblem(simulator, u0, tspan, 1.0) # Simulate with L = 1
+sol = solve(prob, Tsit5(), saveat = tsteps, abstol = 1e-8, reltol = 1e-8)
+y = sol[1, :] # This is the data we have available for parameter estimation
+plot(y, title = "Pendulum simulation", label = "angle")
```
-
We also define functions that simulate the system and calculate the loss, given a parameter `p` corresponding to the length.
```@example PEM
function simulate(p)
- _prob = remake(prob,p=p)
- solve(_prob, Tsit5(), saveat=tsteps, abstol = 1e-8, reltol = 1e-8)
+ _prob = remake(prob, p = p)
+ solve(_prob, Tsit5(), saveat = tsteps, abstol = 1e-8, reltol = 1e-8)
end
function simloss(p)
@@ -58,47 +60,48 @@ function simloss(p)
if !SciMLBase.successful_retcode(yh.retcode)
return Inf
end
- e2 = yh[1,:]
+ e2 = yh[1, :]
e2 .= abs2.(y .- e2)
return mean(e2)
end
```
+
We now look at the loss landscape as a function of the pendulum length:
```@example PEM
Ls = 0.01:0.01:2
simlosses = simloss.(Ls)
-fig_loss = plot(Ls, simlosses, title = "Loss landscape", xlabel="Pendulum length", ylabel = "MSE loss", lab="Simulation loss")
+fig_loss = plot(Ls, simlosses, title = "Loss landscape", xlabel = "Pendulum length",
+ ylabel = "MSE loss", lab = "Simulation loss")
```
-
This figure is interesting, the loss is of course 0 for the true value $L=1$, but for values $L < 1$, the overall slope actually points in the wrong direction! Moreover, the loss is oscillatory, indicating that this is a terrible function to optimize, and that we would need a very good initial guess for a local search to converge to the true value. Note, this example is chosen to be one-dimensional in order to allow these kinds of visualizations, and one-dimensional problems are typically not hard to solve, but the reasoning extends to higher-dimensional and harder problems.
-We will now move on to defining a *predictor* model. Our predictor will be very simple, each time step, we will calculate the error $e$ between the simulated angle $\theta$ and the measured angle $y$. A part of this error will be used to correct the state of the pendulum. The correction we use is linear and looks like $Ke = K(y - \theta)$. We have formed what is commonly referred to as a (linear) *observer*. The [Kalman filter](https://en.wikipedia.org/wiki/Kalman_filter) is a particular kind of linear observer, where $K$ is calculated based on a statistical model of the disturbances that act on the system. We will stay with a simple, fixed-gain observer here for simplicity.
+We will now move on to defining a *predictor* model. Our predictor will be very simple, each time step, we will calculate the error $e$ between the simulated angle $\theta$ and the measured angle $y$. A part of this error will be used to correct the state of the pendulum. The correction we use is linear and looks like $Ke = K(y - \theta)$. We have formed what is commonly referred to as a (linear) *observer*. The [Kalman filter](https://en.wikipedia.org/wiki/Kalman_filter) is a particular kind of linear observer, where $K$ is calculated based on a statistical model of the disturbances that act on the system. We will stay with a simple, fixed-gain observer here for simplicity.
To feed the sampled data into the continuous-time simulation, we make use of an interpolator. We also define new functions, `predictor` that contains the pendulum dynamics with the observer correction, a `prediction` function that performs the rollout (we're not using the word simulation to not confuse with the setting above) and a loss function.
```@example PEM
-y_int = LinearInterpolation(y,tsteps)
+y_int = LinearInterpolation(y, tsteps)
-function predictor(du,u,p,t)
+function predictor(du, u, p, t)
g = 9.82
L, K, y = p # pendulum length, observer gain and measurements
- gL = g/L
- θ = u[1]
+ gL = g / L
+ θ = u[1]
dθ = u[2]
yt = y(t)
e = yt - θ
- du[1] = dθ + K*e
- du[2] = -gL * sin(θ)
+ du[1] = dθ + K * e
+ du[2] = -gL * sin(θ)
end
-predprob = ODEProblem(predictor,u0,tspan,nothing)
+predprob = ODEProblem(predictor, u0, tspan, nothing)
function prediction(p)
p_full = (p..., y_int)
- _prob = remake(predprob,u0=eltype(p).(u0),p=p_full)
- solve(_prob, Tsit5(), saveat=tsteps, abstol = 1e-8, reltol = 1e-8)
+ _prob = remake(predprob, u0 = eltype(p).(u0), p = p_full)
+ solve(_prob, Tsit5(), saveat = tsteps, abstol = 1e-8, reltol = 1e-8)
end
function predloss(p)
@@ -106,7 +109,7 @@ function predloss(p)
if !SciMLBase.successful_retcode(yh.retcode)
return Inf
end
- e2 = yh[1,:]
+ e2 = yh[1, :]
e2 .= abs2.(y .- e2)
return mean(e2)
end
@@ -116,10 +119,9 @@ predlosses = map(Ls) do L
predloss(p)
end
-plot!(Ls, predlosses, lab="Prediction loss")
+plot!(Ls, predlosses, lab = "Prediction loss")
```
-
Once gain, we look at the loss as a function of the parameter, and this time it looks a lot better. The loss is not convex, but the gradient points in the right direction over a much larger interval. Here, we arbitrarily set the observer gain to $K=1$, we will later let the optimizer learn this parameter.
For completeness, we also perform estimation using both losses. We choose an initial guess we know will be hard for the simulation-error minimization just to drive home the point:
@@ -127,27 +129,26 @@ For completeness, we also perform estimation using both losses. We choose an ini
```@example PEM
L0 = [0.7] # Initial guess of pendulum length
adtype = Optimization.AutoForwardDiff()
-optf = Optimization.OptimizationFunction((x,p)->simloss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> simloss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, L0)
ressim = Optimization.solve(optprob, PolyOpt(),
- maxiters = 5000)
-ysim = simulate(ressim.u)[1,:]
+ maxiters = 5000)
+ysim = simulate(ressim.u)[1, :]
-plot(tsteps, [y ysim], label=["Data" "Simulation model"])
+plot(tsteps, [y ysim], label = ["Data" "Simulation model"])
p0 = [0.7, 1.0] # Initial guess of length and observer gain K
-optf2 = Optimization.OptimizationFunction((p,_)->predloss(p), adtype)
+optf2 = Optimization.OptimizationFunction((p, _) -> predloss(p), adtype)
optprob2 = Optimization.OptimizationProblem(optf2, p0)
respred = Optimization.solve(optprob2, PolyOpt(),
- maxiters = 5000)
-ypred = simulate(respred.u)[1,:]
+ maxiters = 5000)
+ypred = simulate(respred.u)[1, :]
-plot!(tsteps, ypred, label="Prediction model")
+plot!(tsteps, ypred, label = "Prediction model")
```
-
The estimated parameters $(L, K)$ are
```@example PEM
@@ -155,38 +156,37 @@ respred.u
```
Now, we might ask ourselves why we used a correct on the form $Ke$ and didn't instead set the angle in the simulation *equal* to the measurement. The reason is twofold
-1. If our prediction of the angle is 100% based on the measurements, the model parameters do not matter for the prediction, and we thus cannot hope to learn their values.
-2. The measurement is usually noisy, and we thus want to *fuse* the predictive power of the model with the information of the measurements. The Kalman filter is an optimal approach to this information fusion under special circumstances (linear model, Gaussian noise).
-We thus let the optimization *learn* the best value of the observer gain in order to make the best predictions.
+ 1. If our prediction of the angle is 100% based on the measurements, the model parameters do not matter for the prediction, and we thus cannot hope to learn their values.
+ 2. The measurement is usually noisy, and we thus want to *fuse* the predictive power of the model with the information of the measurements. The Kalman filter is an optimal approach to this information fusion under special circumstances (linear model, Gaussian noise).
+
+We thus let the optimization *learn* the best value of the observer gain in order to make the best predictions.
As a last step, we perform the estimation also with some measurement noise to verify that it does something reasonable:
```@example PEM
yn = y .+ 0.1f0 .* randn.(Float32)
-y_int = LinearInterpolation(yn,tsteps) # redefine the interpolator to contain noisy measurements
+y_int = LinearInterpolation(yn, tsteps) # redefine the interpolator to contain noisy measurements
-optf = Optimization.OptimizationFunction((x,p)->predloss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> predloss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p0)
resprednoise = Optimization.solve(optprob, PolyOpt(),
- maxiters = 5000)
+ maxiters = 5000)
-yprednoise = prediction(resprednoise.u)[1,:]
-plot!(tsteps, yprednoise, label="Prediction model with noisy measurements")
+yprednoise = prediction(resprednoise.u)[1, :]
+plot!(tsteps, yprednoise, label = "Prediction model with noisy measurements")
```
-
```@example PEM
resprednoise.u
```
This example has illustrated basic use of the prediction-error method for parameter estimation. In our example, the measurement we had corresponded directly to one of the states, and coming up with an observer/predictor that worked was not too hard. For more difficult cases, we may opt to use a nonlinear observer, such as an extended Kalman filter (EKF) or design a Kalman filter based on a linearization of the system around some operating point.
-As a last note, there are several other methods available to improve the loss landscape and avoid local minima, such as multiple-shooting. The prediction-error method can easily be combined with most of those methods.
+As a last note, there are several other methods available to improve the loss landscape and avoid local minima, such as multiple-shooting. The prediction-error method can easily be combined with most of those methods.
References:
[^Ljung]: Ljung, Lennart. "System identification---Theory for the user".
-
[^Larsson]: Larsson, Roger, et al. "Direct prediction-error identification of unstable nonlinear systems applied to flight test data."
diff --git a/docs/src/examples/ode/second_order_adjoints.md b/docs/src/examples/ode/second_order_adjoints.md
index 5f59afb4e..2b72b4874 100644
--- a/docs/src/examples/ode/second_order_adjoints.md
+++ b/docs/src/examples/ode/second_order_adjoints.md
@@ -23,19 +23,19 @@ tsteps = range(tspan[1], tspan[2], length = datasize)
function trueODEfunc(du, u, p, t)
true_A = [-0.1 2.0; -2.0 -0.1]
- du .= ((u.^3)'true_A)'
+ du .= ((u .^ 3)'true_A)'
end
prob_trueode = ODEProblem(trueODEfunc, u0, tspan)
ode_data = Array(solve(prob_trueode, Tsit5(), saveat = tsteps))
-dudt2 = Flux.Chain(x -> x.^3,
+dudt2 = Flux.Chain(x -> x .^ 3,
Flux.Dense(2, 50, tanh),
Flux.Dense(50, 2))
prob_neuralode = NeuralODE(dudt2, tspan, Tsit5(), saveat = tsteps)
function predict_neuralode(p)
- Array(prob_neuralode(u0, p)[1])
+ Array(prob_neuralode(u0, p)[1])
end
function loss_neuralode(p)
@@ -48,35 +48,37 @@ end
list_plots = []
iter = 0
callback = function (p, l, pred; doplot = false)
- global list_plots, iter
+ global list_plots, iter
- if iter == 0
- list_plots = []
- end
- iter += 1
+ if iter == 0
+ list_plots = []
+ end
+ iter += 1
- display(l)
+ display(l)
- # plot current prediction against data
- plt = scatter(tsteps, ode_data[1,:], label = "data")
- scatter!(plt, tsteps, pred[1,:], label = "prediction")
- push!(list_plots, plt)
- if doplot
- display(plot(plt))
- end
+ # plot current prediction against data
+ plt = scatter(tsteps, ode_data[1, :], label = "data")
+ scatter!(plt, tsteps, pred[1, :], label = "prediction")
+ push!(list_plots, plt)
+ if doplot
+ display(plot(plt))
+ end
- return l < 0.01
+ return l < 0.01
end
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_neuralode(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_neuralode(x), adtype)
optprob1 = Optimization.OptimizationProblem(optf, prob_neuralode.p)
-pstart = Optimization.solve(optprob1, ADAM(0.01), callback=callback, maxiters = 100).u
+pstart = Optimization.solve(optprob1, ADAM(0.01), callback = callback, maxiters = 100).u
optprob2 = Optimization.OptimizationProblem(optf, pstart)
-pmin = Optimization.solve(optprob2, NewtonTrustRegion(), callback=callback, maxiters = 200)
-pmin = Optimization.solve(optprob2, Optim.KrylovTrustRegion(), callback=callback, maxiters = 200)
+pmin = Optimization.solve(optprob2, NewtonTrustRegion(), callback = callback,
+ maxiters = 200)
+pmin = Optimization.solve(optprob2, Optim.KrylovTrustRegion(), callback = callback,
+ maxiters = 200)
```
Note that we do not demonstrate `Newton()` because we have not found a single
diff --git a/docs/src/examples/ode/second_order_neural.md b/docs/src/examples/ode/second_order_neural.md
index 330d70a42..3085b4e17 100644
--- a/docs/src/examples/ode/second_order_neural.md
+++ b/docs/src/examples/ode/second_order_neural.md
@@ -21,21 +21,22 @@ neural network by the mass!)
An example of training a neural network on a second order ODE is as follows:
```@example secondorderneural
-using DifferentialEquations, Flux, Optimization, OptimizationFlux, RecursiveArrayTools, Random
+using DifferentialEquations, Flux, Optimization, OptimizationFlux, RecursiveArrayTools,
+ Random
-u0 = Float32[0.; 2.]
-du0 = Float32[0.; 0.]
+u0 = Float32[0.0; 2.0]
+du0 = Float32[0.0; 0.0]
tspan = (0.0f0, 1.0f0)
-t = range(tspan[1], tspan[2], length=20)
+t = range(tspan[1], tspan[2], length = 20)
model = Flux.Chain(Flux.Dense(2, 50, tanh), Flux.Dense(50, 2))
-p,re = Flux.destructure(model)
+p, re = Flux.destructure(model)
-ff(du,u,p,t) = re(p)(u)
+ff(du, u, p, t) = re(p)(u)
prob = SecondOrderODEProblem{false}(ff, du0, u0, tspan, p)
function predict(p)
- Array(solve(prob, Tsit5(), p=p, saveat=t))
+ Array(solve(prob, Tsit5(), p = p, saveat = t))
end
correct_pos = Float32.(transpose(hcat(collect(0:0.05:1)[2:end], collect(2:-0.05:1)[2:end])))
@@ -50,13 +51,13 @@ opt = ADAM(0.01)
l1 = loss_n_ode(p)
-callback = function (p,l,pred)
+callback = function (p, l, pred)
println(l)
l < 0.01
end
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_n_ode(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_n_ode(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p)
-res = Optimization.solve(optprob, opt; callback = callback, maxiters=1000)
+res = Optimization.solve(optprob, opt; callback = callback, maxiters = 1000)
```
diff --git a/docs/src/examples/optimal_control/feedback_control.md b/docs/src/examples/optimal_control/feedback_control.md
index ca6371949..413261023 100644
--- a/docs/src/examples/optimal_control/feedback_control.md
+++ b/docs/src/examples/optimal_control/feedback_control.md
@@ -10,7 +10,7 @@ on the current state of the dynamical system that will control the second
equation to stay close to 1.
```@example udeneuralcontrol
-using Flux, Optimization, OptimizationPolyalgorithms,
+using Flux, Optimization, OptimizationPolyalgorithms,
SciMLSensitivity, Zygote, DifferentialEquations, Plots, Random
rng = Random.default_rng()
@@ -19,11 +19,11 @@ tspan = (0.0f0, 25.0f0)
tsteps = 0.0f0:1.0:25.0f0
model_univ = Flux.Chain(Flux.Dense(2, 16, tanh),
- Flux.Dense(16, 16, tanh),
- Flux.Dense(16, 1))
+ Flux.Dense(16, 16, tanh),
+ Flux.Dense(16, 1))
# The model weights are destructured into a vector of parameters
-p_model,re = Flux.destructure(model_univ)
+p_model, re = Flux.destructure(model_univ)
n_weights = length(p_model)
# Parameters of the second equation (linear dynamics)
@@ -44,23 +44,23 @@ function dudt_univ!(du, u, p, t)
# Dynamics of the control and system
dmodel_control = re(model_weights)(u)[1]
- dsystem_output = α*system_output + β*model_control
+ dsystem_output = α * system_output + β * model_control
# Update in place
du[1] = dmodel_control
du[2] = dsystem_output
end
-prob_univ = ODEProblem(dudt_univ!, [0f0, u0], tspan, p_all)
-sol_univ = solve(prob_univ, Tsit5(),abstol = 1e-8, reltol = 1e-6)
+prob_univ = ODEProblem(dudt_univ!, [0.0f0, u0], tspan, p_all)
+sol_univ = solve(prob_univ, Tsit5(), abstol = 1e-8, reltol = 1e-6)
function predict_univ(θ)
- return Array(solve(prob_univ, Tsit5(), u0=[0f0, θ[1]], p=θ[2:end],
- sensealg = InterpolatingAdjoint(autojacvec=ReverseDiffVJP(true)),
- saveat = tsteps))
+ return Array(solve(prob_univ, Tsit5(), u0 = [0.0f0, θ[1]], p = θ[2:end],
+ sensealg = InterpolatingAdjoint(autojacvec = ReverseDiffVJP(true)),
+ saveat = tsteps))
end
-loss_univ(θ) = sum(abs2, predict_univ(θ)[2,:] .- 1)
+loss_univ(θ) = sum(abs2, predict_univ(θ)[2, :] .- 1)
l = loss_univ(θ)
```
@@ -68,26 +68,26 @@ l = loss_univ(θ)
list_plots = []
iter = 0
callback = function (θ, l)
- global list_plots, iter
+ global list_plots, iter
- if iter == 0
- list_plots = []
- end
- iter += 1
+ if iter == 0
+ list_plots = []
+ end
+ iter += 1
- println(l)
+ println(l)
- plt = plot(predict_univ(θ)', ylim = (0, 6))
- push!(list_plots, plt)
- display(plt)
- return false
+ plt = plot(predict_univ(θ)', ylim = (0, 6))
+ push!(list_plots, plt)
+ display(plt)
+ return false
end
```
```@example udeneuralcontrol
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_univ(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_univ(x), adtype)
optprob = Optimization.OptimizationProblem(optf, θ)
result_univ = Optimization.solve(optprob, PolyOpt(),
- callback = callback)
+ callback = callback)
```
diff --git a/docs/src/examples/optimal_control/optimal_control.md b/docs/src/examples/optimal_control/optimal_control.md
index 1890344da..a9e10f3a1 100644
--- a/docs/src/examples/optimal_control/optimal_control.md
+++ b/docs/src/examples/optimal_control/optimal_control.md
@@ -36,60 +36,62 @@ will first reduce control cost (the last term) by 10x in order to bump the netwo
of a local minimum. This looks like:
```@example neuraloptimalcontrol
-using Flux, DifferentialEquations, Optimization, OptimizationNLopt, OptimizationFlux,
+using Flux, DifferentialEquations, Optimization, OptimizationNLopt, OptimizationFlux,
SciMLSensitivity, Zygote, Plots, Statistics, Random
rng = Random.default_rng()
-tspan = (0.0f0,8.0f0)
-ann = Flux.Chain(Flux.Dense(1,32,tanh), Flux.Dense(32,32,tanh), Flux.Dense(32,1))
+tspan = (0.0f0, 8.0f0)
+ann = Flux.Chain(Flux.Dense(1, 32, tanh), Flux.Dense(32, 32, tanh), Flux.Dense(32, 1))
θ, re = Flux.destructure(ann)
-function dxdt_(dx,x,p,t)
+function dxdt_(dx, x, p, t)
x1, x2 = x
dx[1] = x[2]
dx[2] = re(p)([t])[1]^3
end
-x0 = [-4f0,0f0]
+x0 = [-4.0f0, 0.0f0]
ts = Float32.(collect(0.0:0.01:tspan[2]))
-prob = ODEProblem(dxdt_,x0,tspan,θ)
-solve(prob,Vern9(),abstol=1e-10,reltol=1e-10)
+prob = ODEProblem(dxdt_, x0, tspan, θ)
+solve(prob, Vern9(), abstol = 1e-10, reltol = 1e-10)
function predict_adjoint(θ)
- Array(solve(prob,Vern9(),p=θ,saveat=ts,sensealg=InterpolatingAdjoint(autojacvec=ReverseDiffVJP(true))))
+ Array(solve(prob, Vern9(), p = θ, saveat = ts,
+ sensealg = InterpolatingAdjoint(autojacvec = ReverseDiffVJP(true))))
end
function loss_adjoint(θ)
- x = predict_adjoint(θ)
- mean(abs2,4.0 .- x[1,:]) + 2mean(abs2,x[2,:]) + mean(abs2,[first(re(θ)([t])) for t in ts])/10
+ x = predict_adjoint(θ)
+ mean(abs2, 4.0 .- x[1, :]) + 2mean(abs2, x[2, :]) +
+ mean(abs2, [first(re(θ)([t])) for t in ts]) / 10
end
l = loss_adjoint(θ)
-callback = function (θ,l; doplot=false)
- println(l)
+callback = function (θ, l; doplot = false)
+ println(l)
- if doplot
- p = plot(solve(remake(prob,p=θ),Tsit5(),saveat=0.01),ylim=(-6,6),lw=3)
- plot!(p,ts,[first(re(θ)([t])) for t in ts],label="u(t)",lw=3)
- display(p)
- end
+ if doplot
+ p = plot(solve(remake(prob, p = θ), Tsit5(), saveat = 0.01), ylim = (-6, 6), lw = 3)
+ plot!(p, ts, [first(re(θ)([t])) for t in ts], label = "u(t)", lw = 3)
+ display(p)
+ end
- return false
+ return false
end
# Display the ODE with the current parameter values.
-callback(θ,l)
+callback(θ, l)
# Setup and run the optimization
loss1 = loss_adjoint(θ)
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss_adjoint(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_adjoint(x), adtype)
optprob = Optimization.OptimizationProblem(optf, θ)
-res1 = Optimization.solve(optprob, ADAM(0.005), callback = callback,maxiters=100)
+res1 = Optimization.solve(optprob, ADAM(0.005), callback = callback, maxiters = 100)
optprob2 = Optimization.OptimizationProblem(optf, res1.u)
res2 = Optimization.solve(optprob2,
- NLopt.LD_LBFGS(), maxiters=100)
+ NLopt.LD_LBFGS(), maxiters = 100)
```
Now that the system is in a better behaved part of parameter space, we return to
@@ -97,23 +99,24 @@ the original loss function to finish the optimization:
```@example neuraloptimalcontrol
function loss_adjoint(θ)
- x = predict_adjoint(θ)
- mean(abs2,4.0 .- x[1,:]) + 2mean(abs2,x[2,:]) + mean(abs2,[first(re(θ)([t])) for t in ts])
+ x = predict_adjoint(θ)
+ mean(abs2, 4.0 .- x[1, :]) + 2mean(abs2, x[2, :]) +
+ mean(abs2, [first(re(θ)([t])) for t in ts])
end
-optf3 = Optimization.OptimizationFunction((x,p)->loss_adjoint(x), adtype)
+optf3 = Optimization.OptimizationFunction((x, p) -> loss_adjoint(x), adtype)
optprob3 = Optimization.OptimizationProblem(optf3, res2.u)
res3 = Optimization.solve(optprob3,
- NLopt.LD_LBFGS(),maxiters=100)
+ NLopt.LD_LBFGS(), maxiters = 100)
```
Now let's see what we received:
```@example neuraloptimalcontrol
l = loss_adjoint(res3.u)
-callback(res3.u,l)
-p = plot(solve(remake(prob,p=res3.u),Tsit5(),saveat=0.01),ylim=(-6,6),lw=3)
-plot!(p,ts,[first(re(res3.u)([t])) for t in ts],label="u(t)",lw=3)
+callback(res3.u, l)
+p = plot(solve(remake(prob, p = res3.u), Tsit5(), saveat = 0.01), ylim = (-6, 6), lw = 3)
+plot!(p, ts, [first(re(res3.u)([t])) for t in ts], label = "u(t)", lw = 3)
```
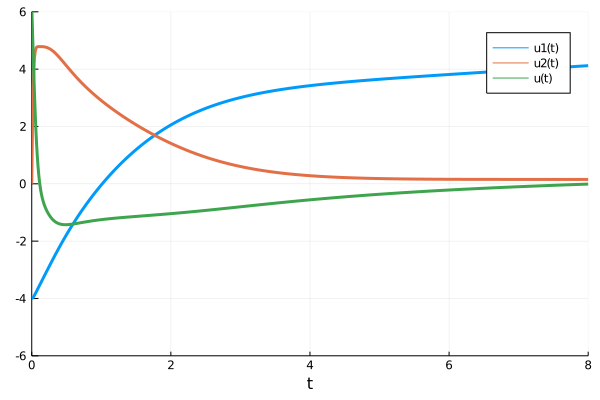
diff --git a/docs/src/examples/pde/pde_constrained.md b/docs/src/examples/pde/pde_constrained.md
index bad9dd86c..6f62bb09c 100644
--- a/docs/src/examples/pde/pde_constrained.md
+++ b/docs/src/examples/pde/pde_constrained.md
@@ -4,91 +4,92 @@ This example uses a prediction model to optimize the one-dimensional Heat Equati
(Step-by-step description below)
```@example pde
-using DelimitedFiles,Plots
+using DelimitedFiles, Plots
using DifferentialEquations, Optimization, OptimizationPolyalgorithms, Zygote
# Problem setup parameters:
Lx = 10.0
-x = 0.0:0.01:Lx
+x = 0.0:0.01:Lx
dx = x[2] - x[1]
Nx = size(x)
-u0 = exp.(-(x.-3.0).^2) # I.C
+u0 = exp.(-(x .- 3.0) .^ 2) # I.C
## Problem Parameters
-p = [1.0,1.0] # True solution parameters
-xtrs = [dx,Nx] # Extra parameters
-dt = 0.40*dx^2 # CFL condition
-t0, tMax = 0.0 ,1000*dt
-tspan = (t0,tMax)
-t = t0:dt:tMax;
+p = [1.0, 1.0] # True solution parameters
+xtrs = [dx, Nx] # Extra parameters
+dt = 0.40 * dx^2 # CFL condition
+t0, tMax = 0.0, 1000 * dt
+tspan = (t0, tMax)
+t = t0:dt:tMax;
## Definition of Auxiliary functions
-function ddx(u,dx)
+function ddx(u, dx)
"""
2nd order Central difference for 1st degree derivative
"""
- return [[zero(eltype(u))] ; (u[3:end] - u[1:end-2]) ./ (2.0*dx) ; [zero(eltype(u))]]
+ return [[zero(eltype(u))]; (u[3:end] - u[1:(end - 2)]) ./ (2.0 * dx); [zero(eltype(u))]]
end
-
-function d2dx(u,dx)
+function d2dx(u, dx)
"""
2nd order Central difference for 2nd degree derivative
"""
- return [[zero(eltype(u))]; (u[3:end] - 2.0.*u[2:end-1] + u[1:end-2]) ./ (dx^2); [zero(eltype(u))]]
+ return [[zero(eltype(u))];
+ (u[3:end] - 2.0 .* u[2:(end - 1)] + u[1:(end - 2)]) ./ (dx^2);
+ [zero(eltype(u))]]
end
## ODE description of the Physics:
-function heat(u,p,t)
+function heat(u, p, t)
# Model parameters
a0, a1 = p
- dx,Nx = xtrs #[1.0,3.0,0.125,100]
- return 2.0*a0 .* u + a1 .* d2dx(u, dx)
+ dx, Nx = xtrs #[1.0,3.0,0.125,100]
+ return 2.0 * a0 .* u + a1 .* d2dx(u, dx)
end
# Testing Solver on linear PDE
-prob = ODEProblem(heat,u0,tspan,p)
-sol = solve(prob,Tsit5(), dt=dt,saveat=t);
+prob = ODEProblem(heat, u0, tspan, p)
+sol = solve(prob, Tsit5(), dt = dt, saveat = t);
-plot(x, sol.u[1], lw=3, label="t0", size=(800,500))
-plot!(x, sol.u[end],lw=3, ls=:dash, label="tMax")
+plot(x, sol.u[1], lw = 3, label = "t0", size = (800, 500))
+plot!(x, sol.u[end], lw = 3, ls = :dash, label = "tMax")
-ps = [0.1, 0.2]; # Initial guess for model parameters
+ps = [0.1, 0.2]; # Initial guess for model parameters
function predict(θ)
- Array(solve(prob,Tsit5(),p=θ,dt=dt,saveat=t))
+ Array(solve(prob, Tsit5(), p = θ, dt = dt, saveat = t))
end
## Defining Loss function
function loss(θ)
pred = predict(θ)
- l = predict(θ) - sol
+ l = predict(θ) - sol
return sum(abs2, l), pred # Mean squared error
end
-l,pred = loss(ps)
+l, pred = loss(ps)
size(pred), size(sol), size(t) # Checking sizes
-LOSS = [] # Loss accumulator
-PRED = [] # prediction accumulator
-PARS = [] # parameters accumulator
+LOSS = [] # Loss accumulator
+PRED = [] # prediction accumulator
+PARS = [] # parameters accumulator
-callback = function (θ,l,pred) #callback function to observe training
- display(l)
- append!(PRED, [pred])
- append!(LOSS, l)
- append!(PARS, [θ])
- false
+callback = function (θ, l, pred) #callback function to observe training
+ display(l)
+ append!(PRED, [pred])
+ append!(LOSS, l)
+ append!(PARS, [θ])
+ false
end
-callback(ps,loss(ps)...) # Testing callback function
+callback(ps, loss(ps)...) # Testing callback function
# Let see prediction vs. Truth
-scatter(sol[:,end], label="Truth", size=(800,500))
-plot!(PRED[end][:,end], lw=2, label="Prediction")
+scatter(sol[:, end], label = "Truth", size = (800, 500))
+plot!(PRED[end][:, end], lw = 2, label = "Prediction")
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, ps)
res = Optimization.solve(optprob, PolyOpt(), callback = callback)
@@ -100,8 +101,8 @@ res = Optimization.solve(optprob, PolyOpt(), callback = callback)
### Load Packages
```@example pde2
-using DelimitedFiles,Plots
-using DifferentialEquations, Optimization, OptimizationPolyalgorithms,
+using DelimitedFiles, Plots
+using DifferentialEquations, Optimization, OptimizationPolyalgorithms,
Zygote
```
@@ -114,32 +115,32 @@ steps of **4.0e-5**.
```@example pde2
# Problem setup parameters:
Lx = 10.0
-x = 0.0:0.01:Lx
+x = 0.0:0.01:Lx
dx = x[2] - x[1]
Nx = size(x)
-u0 = exp.(-(x.-3.0).^2) # I.C
+u0 = exp.(-(x .- 3.0) .^ 2) # I.C
## Problem Parameters
-p = [1.0,1.0] # True solution parameters
-xtrs = [dx,Nx] # Extra parameters
-dt = 0.40*dx^2 # CFL condition
-t0, tMax = 0.0 ,1000*dt
-tspan = (t0,tMax)
-t = t0:dt:tMax;
+p = [1.0, 1.0] # True solution parameters
+xtrs = [dx, Nx] # Extra parameters
+dt = 0.40 * dx^2 # CFL condition
+t0, tMax = 0.0, 1000 * dt
+tspan = (t0, tMax)
+t = t0:dt:tMax;
```
In plain terms, the quantities that were defined are:
-- `x` (to `Lx`) spans the specified 1D space
-- `dx` = distance between two points
-- `Nx` = total size of space
-- `u0` = initial condition
-- `p` = true solution
-- `xtrs` = convenient grouping of `dx` and `Nx` into Array
-- `dt` = time distance between two points
-- `t` (`t0` to `tMax`) spans the specified time frame
-- `tspan` = span of `t`
+ - `x` (to `Lx`) spans the specified 1D space
+ - `dx` = distance between two points
+ - `Nx` = total size of space
+ - `u0` = initial condition
+ - `p` = true solution
+ - `xtrs` = convenient grouping of `dx` and `Nx` into Array
+ - `dt` = time distance between two points
+ - `t` (`t0` to `tMax`) spans the specified time frame
+ - `tspan` = span of `t`
### Auxiliary Functions
@@ -148,19 +149,20 @@ Difference** is used in both the 1st and 2nd degree derivatives.
```@example pde2
## Definition of Auxiliary functions
-function ddx(u,dx)
+function ddx(u, dx)
"""
2nd order Central difference for 1st degree derivative
"""
- return [[zero(eltype(u))] ; (u[3:end] - u[1:end-2]) ./ (2.0*dx) ; [zero(eltype(u))]]
+ return [[zero(eltype(u))]; (u[3:end] - u[1:(end - 2)]) ./ (2.0 * dx); [zero(eltype(u))]]
end
-
-function d2dx(u,dx)
+function d2dx(u, dx)
"""
2nd order Central difference for 2nd degree derivative
"""
- return [[zero(eltype(u))]; (u[3:end] - 2.0.*u[2:end-1] + u[1:end-2]) ./ (dx^2); [zero(eltype(u))]]
+ return [[zero(eltype(u))];
+ (u[3:end] - 2.0 .* u[2:(end - 1)] + u[1:(end - 2)]) ./ (dx^2);
+ [zero(eltype(u))]]
end
```
@@ -170,11 +172,11 @@ Next, we set up our desired set of equations in order to define our problem.
```@example pde2
## ODE description of the Physics:
-function heat(u,p,t)
+function heat(u, p, t)
# Model parameters
a0, a1 = p
- dx,Nx = xtrs #[1.0,3.0,0.125,100]
- return 2.0*a0 .* u + a1 .* d2dx(u, dx)
+ dx, Nx = xtrs #[1.0,3.0,0.125,100]
+ return 2.0 * a0 .* u + a1 .* d2dx(u, dx)
end
```
@@ -185,11 +187,11 @@ will compare to further on.
```@example pde2
# Testing Solver on linear PDE
-prob = ODEProblem(heat,u0,tspan,p)
-sol = solve(prob,Tsit5(), dt=dt,saveat=t);
+prob = ODEProblem(heat, u0, tspan, p)
+sol = solve(prob, Tsit5(), dt = dt, saveat = t);
-plot(x, sol.u[1], lw=3, label="t0", size=(800,500))
-plot!(x, sol.u[end],lw=3, ls=:dash, label="tMax")
+plot(x, sol.u[1], lw = 3, label = "t0", size = (800, 500))
+plot!(x, sol.u[end], lw = 3, ls = :dash, label = "tMax")
```
### Building the Prediction Model
@@ -200,9 +202,9 @@ non-linear transformation in one layer using `solve`. If unfamiliar with the con
refer to [here](https://julialang.org/blog/2019/01/fluxdiffeq/).
```@example pde2
-ps = [0.1, 0.2]; # Initial guess for model parameters
+ps = [0.1, 0.2]; # Initial guess for model parameters
function predict(θ)
- Array(solve(prob,Tsit5(),p=θ,dt=dt,saveat=t))
+ Array(solve(prob, Tsit5(), p = θ, dt = dt, saveat = t))
end
```
@@ -221,11 +223,11 @@ use the **mean squared error**.
## Defining Loss function
function loss(θ)
pred = predict(θ)
- l = predict(θ) - sol
+ l = predict(θ) - sol
return sum(abs2, l), pred # Mean squared error
end
-l,pred = loss(ps)
+l, pred = loss(ps)
size(pred), size(sol), size(t) # Checking sizes
```
@@ -241,19 +243,19 @@ loss, the previous predictions and the previous parameters with `LOSS`, `PRED` a
accumulators.
```@example pde2
-LOSS = [] # Loss accumulator
-PRED = [] # prediction accumulator
-PARS = [] # parameters accumulator
-
-callback = function (θ,l,pred) #callback function to observe training
- display(l)
- append!(PRED, [pred])
- append!(LOSS, l)
- append!(PARS, [θ])
- false
+LOSS = [] # Loss accumulator
+PRED = [] # prediction accumulator
+PARS = [] # parameters accumulator
+
+callback = function (θ, l, pred) #callback function to observe training
+ display(l)
+ append!(PRED, [pred])
+ append!(LOSS, l)
+ append!(PARS, [θ])
+ false
end
-callback(ps,loss(ps)...) # Testing callback function
+callback(ps, loss(ps)...) # Testing callback function
```
### Plotting Prediction vs Ground Truth
@@ -264,8 +266,8 @@ almost perfectly when the PDE finishes its training and the loss is close to 0.
```@example pde2
# Let see prediction vs. Truth
-scatter(sol[:,end], label="Truth", size=(800,500))
-plot!(PRED[end][:,end], lw=2, label="Prediction")
+scatter(sol[:, end], label = "Truth", size = (800, 500))
+plot!(PRED[end][:, end], lw = 2, label = "Prediction")
```
### Train
@@ -276,7 +278,7 @@ parameters that minimize the cost function.
```@example pde2
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, ps)
res = Optimization.solve(optprob, PolyOpt(), callback = callback)
@@ -284,4 +286,4 @@ res = Optimization.solve(optprob, PolyOpt(), callback = callback)
```
We successfully predict the final `ps` to be equal to **[0.999999999999975,
-1.0000000000000213]** vs the true solution of `p` = **[1.0, 1.0]**
\ No newline at end of file
+1.0000000000000213]** vs the true solution of `p` = **[1.0, 1.0]**
diff --git a/docs/src/examples/sde/SDE_control.md b/docs/src/examples/sde/SDE_control.md
index 20f845f27..1fd43560a 100644
--- a/docs/src/examples/sde/SDE_control.md
+++ b/docs/src/examples/sde/SDE_control.md
@@ -14,6 +14,7 @@ to the control parameter Ω(t) which rotates the quantum state about the `x`-axi
to ultimately prepare and stabilize the qubit in the excited state.
## Copy-Pasteable Code
+
Before getting to the explanation, here's some code to start with. We will
follow a full explanation of the definition and training process:
@@ -26,7 +27,6 @@ using StochasticDiffEq, DiffEqCallbacks, DiffEqNoiseProcess
using Statistics, LinearAlgebra, Random
using Plots
-
#################################################
lr = 0.01f0
epochs = 100
@@ -39,8 +39,8 @@ dt = 0.0005f0
tinterval = 0.05f0
tstart = 0.0f0
Nintervals = 20 # total number of intervals, total time = t_interval*Nintervals
-tspan = (tstart,tinterval*Nintervals)
-ts = Array(tstart:dt:(Nintervals*tinterval+dt)) # time array for noise grid
+tspan = (tstart, tinterval * Nintervals)
+ts = Array(tstart:dt:(Nintervals * tinterval + dt)) # time array for noise grid
# Hamiltonian parameters
Δ = 20.0f0
@@ -50,48 +50,53 @@ ts = Array(tstart:dt:(Nintervals*tinterval+dt)) # time array for noise grid
# loss hyperparameters
C1 = Float32(1.0) # evolution state fidelity
-struct Parameters{flType,intType,tType}
- lr::flType
- epochs::intType
- numtraj::intType
- numtrajplot::intType
- dt::flType
- tinterval::flType
- tspan::tType
- Nintervals::intType
- ts::Vector{flType}
- Δ::flType
- Ωmax::flType
- κ::flType
- C1::flType
+struct Parameters{flType, intType, tType}
+ lr::flType
+ epochs::intType
+ numtraj::intType
+ numtrajplot::intType
+ dt::flType
+ tinterval::flType
+ tspan::tType
+ Nintervals::intType
+ ts::Vector{flType}
+ Δ::flType
+ Ωmax::flType
+ κ::flType
+ C1::flType
end
-myparameters = Parameters{typeof(dt),typeof(numtraj), typeof(tspan)}(
- lr, epochs, numtraj, numtrajplot, dt, tinterval, tspan, Nintervals, ts,
- Δ, Ωmax, κ, C1)
+myparameters = Parameters{typeof(dt), typeof(numtraj), typeof(tspan)}(lr, epochs, numtraj,
+ numtrajplot, dt,
+ tinterval, tspan,
+ Nintervals, ts,
+ Δ, Ωmax, κ, C1)
################################################
# Define Neural Network
# state-aware
-nn = FastChain(
- FastDense(4, 32, relu),
- FastDense(32, 1, tanh))
+nn = FastChain(FastDense(4, 32, relu),
+ FastDense(32, 1, tanh))
p_nn = initial_params(nn) # random initial parameters
-
###############################################
# initial state anywhere on the Bloch sphere
function prepare_initial(dt, n_par)
- # shape 4 x n_par
- # input number of parallel realizations and dt for type inference
- # random position on the Bloch sphere
- theta = acos.(2*rand(typeof(dt),n_par).-1) # uniform sampling for cos(theta) between -1 and 1
- phi = rand(typeof(dt),n_par)*2*pi # uniform sampling for phi between 0 and 2pi
- # real and imaginary parts ceR, cdR, ceI, cdI
- u0 = [cos.(theta/2), sin.(theta/2).*cos.(phi), false*theta, sin.(theta/2).*sin.(phi)]
- return vcat(transpose.(u0)...) # build matrix
+ # shape 4 x n_par
+ # input number of parallel realizations and dt for type inference
+ # random position on the Bloch sphere
+ theta = acos.(2 * rand(typeof(dt), n_par) .- 1) # uniform sampling for cos(theta) between -1 and 1
+ phi = rand(typeof(dt), n_par) * 2 * pi # uniform sampling for phi between 0 and 2pi
+ # real and imaginary parts ceR, cdR, ceI, cdI
+ u0 = [
+ cos.(theta / 2),
+ sin.(theta / 2) .* cos.(phi),
+ false * theta,
+ sin.(theta / 2) .* sin.(phi),
+ ]
+ return vcat(transpose.(u0)...) # build matrix
end
# target state
@@ -102,186 +107,180 @@ u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
###############################################
# Define SDE
-function qubit_drift!(du,u,p,t)
- # expansion coefficients |Ψ> = ce |e> + cd |d>
- ceR, cdR, ceI, cdI = u # real and imaginary parts
-
- # Δ: atomic frequency
- # Ω: Rabi frequency for field in x direction
- # κ: spontaneous emission
- Δ, Ωmax, κ = p[end-2:end]
- nn_weights = p[1:end-3]
- Ω = (nn(u, nn_weights).*Ωmax)[1]
-
- @inbounds begin
- du[1] = 1//2*(ceI*Δ-ceR*κ+cdI*Ω)
- du[2] = -cdI*Δ/2 + 1*ceR*(cdI*ceI+cdR*ceR)*κ+ceI*Ω/2
- du[3] = 1//2*(-ceR*Δ-ceI*κ-cdR*Ω)
- du[4] = cdR*Δ/2 + 1*ceI*(cdI*ceI+cdR*ceR)*κ-ceR*Ω/2
- end
- return nothing
+function qubit_drift!(du, u, p, t)
+ # expansion coefficients |Ψ> = ce |e> + cd |d>
+ ceR, cdR, ceI, cdI = u # real and imaginary parts
+
+ # Δ: atomic frequency
+ # Ω: Rabi frequency for field in x direction
+ # κ: spontaneous emission
+ Δ, Ωmax, κ = p[(end - 2):end]
+ nn_weights = p[1:(end - 3)]
+ Ω = (nn(u, nn_weights) .* Ωmax)[1]
+
+ @inbounds begin
+ du[1] = 1 // 2 * (ceI * Δ - ceR * κ + cdI * Ω)
+ du[2] = -cdI * Δ / 2 + 1 * ceR * (cdI * ceI + cdR * ceR) * κ + ceI * Ω / 2
+ du[3] = 1 // 2 * (-ceR * Δ - ceI * κ - cdR * Ω)
+ du[4] = cdR * Δ / 2 + 1 * ceI * (cdI * ceI + cdR * ceR) * κ - ceR * Ω / 2
+ end
+ return nothing
end
-function qubit_diffusion!(du,u,p,t)
- ceR, cdR, ceI, cdI = u # real and imaginary parts
+function qubit_diffusion!(du, u, p, t)
+ ceR, cdR, ceI, cdI = u # real and imaginary parts
- κ = p[end]
+ κ = p[end]
- du .= false
+ du .= false
- @inbounds begin
- #du[1] = zero(ceR)
- du[2] += sqrt(κ)*ceR
- #du[3] = zero(ceR)
- du[4] += sqrt(κ)*ceI
- end
- return nothing
+ @inbounds begin
+ #du[1] = zero(ceR)
+ du[2] += sqrt(κ) * ceR
+ #du[3] = zero(ceR)
+ du[4] += sqrt(κ) * ceI
+ end
+ return nothing
end
# normalization callback
-condition(u,t,integrator) = true
+condition(u, t, integrator) = true
function affect!(integrator)
- integrator.u .= integrator.u/norm(integrator.u)
+ integrator.u .= integrator.u / norm(integrator.u)
end
-callback = DiscreteCallback(condition, affect!, save_positions=(false, false))
+callback = DiscreteCallback(condition, affect!, save_positions = (false, false))
-CreateGrid(t,W1) = NoiseGrid(t,W1)
+CreateGrid(t, W1) = NoiseGrid(t, W1)
Zygote.@nograd CreateGrid #avoid taking grads of this function
# set scalar random process
-W = sqrt(myparameters.dt)*randn(typeof(myparameters.dt),size(myparameters.ts)) #for 1 trajectory
-W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
-NG = CreateGrid(myparameters.ts,W1)
+W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+NG = CreateGrid(myparameters.ts, W1)
# get control pulses
p_all = [p_nn; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
# define SDE problem
-prob = SDEProblem{true}(qubit_drift!, qubit_diffusion!, vec(u0[:,1]), myparameters.tspan, p_all,
- callback=callback, noise=NG
- )
+prob = SDEProblem{true}(qubit_drift!, qubit_diffusion!, vec(u0[:, 1]), myparameters.tspan,
+ p_all,
+ callback = callback, noise = NG)
#########################################
# compute loss
-function g(u,p,t)
- ceR = @view u[1,:,:]
- cdR = @view u[2,:,:]
- ceI = @view u[3,:,:]
- cdI = @view u[4,:,:]
- p[1]*mean((cdR.^2 + cdI.^2) ./ (ceR.^2 + cdR.^2 + ceI.^2 + cdI.^2))
+function g(u, p, t)
+ ceR = @view u[1, :, :]
+ cdR = @view u[2, :, :]
+ ceI = @view u[3, :, :]
+ cdI = @view u[4, :, :]
+ p[1] * mean((cdR .^ 2 + cdI .^ 2) ./ (ceR .^ 2 + cdR .^ 2 + ceI .^ 2 + cdI .^ 2))
end
-
-function loss(p; alg=EM(), sensealg=BacksolveAdjoint(autojacvec=ReverseDiffVJP()))
-
- pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
- u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
-
- function prob_func(prob, i, repeat)
- # prepare initial state and applied control pulse
- u0tmp = deepcopy(vec(u0[:, i]))
- W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
- W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
- NG = CreateGrid(myparameters.ts, W1)
-
- remake(prob,
- p=pars,
- u0=u0tmp,
- callback=callback,
- noise=NG)
- end
-
- ensembleprob = EnsembleProblem(prob,
- prob_func=prob_func,
- safetycopy=true
- )
-
- _sol = solve(ensembleprob, alg, EnsembleThreads(),
- sensealg=sensealg,
- saveat=myparameters.tinterval,
- dt=myparameters.dt,
- adaptive=false,
- trajectories=myparameters.numtraj, batch_size=myparameters.numtraj)
- A = convert(Array, _sol)
-
- l = g(A, [myparameters.C1], nothing)
- # returns loss value
- return l
+function loss(p; alg = EM(), sensealg = BacksolveAdjoint(autojacvec = ReverseDiffVJP()))
+ pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
+ u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
+
+ function prob_func(prob, i, repeat)
+ # prepare initial state and applied control pulse
+ u0tmp = deepcopy(vec(u0[:, i]))
+ W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+ W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+ NG = CreateGrid(myparameters.ts, W1)
+
+ remake(prob,
+ p = pars,
+ u0 = u0tmp,
+ callback = callback,
+ noise = NG)
+ end
+
+ ensembleprob = EnsembleProblem(prob,
+ prob_func = prob_func,
+ safetycopy = true)
+
+ _sol = solve(ensembleprob, alg, EnsembleThreads(),
+ sensealg = sensealg,
+ saveat = myparameters.tinterval,
+ dt = myparameters.dt,
+ adaptive = false,
+ trajectories = myparameters.numtraj, batch_size = myparameters.numtraj)
+ A = convert(Array, _sol)
+
+ l = g(A, [myparameters.C1], nothing)
+ # returns loss value
+ return l
end
#########################################
# visualization -- run for new batch
-function visualize(p; alg=EM())
-
- u0 = prepare_initial(myparameters.dt, myparameters.numtrajplot)
- pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
-
- function prob_func(prob, i, repeat)
- # prepare initial state and applied control pulse
- u0tmp = deepcopy(vec(u0[:, i]))
- W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
- W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
- NG = CreateGrid(myparameters.ts, W1)
-
- remake(prob,
- p=pars,
- u0=u0tmp,
- callback=callback,
- noise=NG)
- end
-
- ensembleprob = EnsembleProblem(prob,
- prob_func=prob_func,
- safetycopy=true
- )
-
- u = solve(ensembleprob, alg, EnsembleThreads(),
- saveat=myparameters.tinterval,
- dt=myparameters.dt,
- adaptive=false, #abstol=1e-6, reltol=1e-6,
- trajectories=myparameters.numtrajplot, batch_size=myparameters.numtrajplot)
-
-
- ceR = @view u[1, :, :]
- cdR = @view u[2, :, :]
- ceI = @view u[3, :, :]
- cdI = @view u[4, :, :]
- infidelity = @. (cdR^2 + cdI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
- meaninfidelity = mean(infidelity)
- loss = myparameters.C1 * meaninfidelity
-
- @info "Loss: " loss
-
- fidelity = @. (ceR^2 + ceI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
-
- mf = mean(fidelity, dims=2)[:]
- sf = std(fidelity, dims=2)[:]
-
- pl1 = plot(0:myparameters.Nintervals, mf,
- ribbon=sf,
- ylim=(0, 1), xlim=(0, myparameters.Nintervals),
- c=1, lw=1.5, xlabel="steps i", ylabel="Fidelity", legend=false)
-
- pl = plot(pl1, legend=false, size=(400, 360))
- return pl, loss
+function visualize(p; alg = EM())
+ u0 = prepare_initial(myparameters.dt, myparameters.numtrajplot)
+ pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
+
+ function prob_func(prob, i, repeat)
+ # prepare initial state and applied control pulse
+ u0tmp = deepcopy(vec(u0[:, i]))
+ W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+ W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+ NG = CreateGrid(myparameters.ts, W1)
+
+ remake(prob,
+ p = pars,
+ u0 = u0tmp,
+ callback = callback,
+ noise = NG)
+ end
+
+ ensembleprob = EnsembleProblem(prob,
+ prob_func = prob_func,
+ safetycopy = true)
+
+ u = solve(ensembleprob, alg, EnsembleThreads(),
+ saveat = myparameters.tinterval,
+ dt = myparameters.dt,
+ adaptive = false, #abstol=1e-6, reltol=1e-6,
+ trajectories = myparameters.numtrajplot,
+ batch_size = myparameters.numtrajplot)
+
+ ceR = @view u[1, :, :]
+ cdR = @view u[2, :, :]
+ ceI = @view u[3, :, :]
+ cdI = @view u[4, :, :]
+ infidelity = @. (cdR^2 + cdI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
+ meaninfidelity = mean(infidelity)
+ loss = myparameters.C1 * meaninfidelity
+
+ @info "Loss: " loss
+
+ fidelity = @. (ceR^2 + ceI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
+
+ mf = mean(fidelity, dims = 2)[:]
+ sf = std(fidelity, dims = 2)[:]
+
+ pl1 = plot(0:(myparameters.Nintervals), mf,
+ ribbon = sf,
+ ylim = (0, 1), xlim = (0, myparameters.Nintervals),
+ c = 1, lw = 1.5, xlabel = "steps i", ylabel = "Fidelity", legend = false)
+
+ pl = plot(pl1, legend = false, size = (400, 360))
+ return pl, loss
end
# burn-in loss
l = loss(p_nn)
# callback to visualize training
-visualization_callback = function (p, l; doplot=false)
- println(l)
+visualization_callback = function (p, l; doplot = false)
+ println(l)
- if doplot
- pl, _ = visualize(p)
- display(pl)
- end
+ if doplot
+ pl, _ = visualize(p)
+ display(pl)
+ end
- return false
+ return false
end
# Display the ODE with the initial parameter values.
-visualization_callback(p_nn, l; doplot=true)
-
+visualization_callback(p_nn, l; doplot = true)
###################################
# training loop
@@ -290,18 +289,20 @@ visualization_callback(p_nn, l; doplot=true)
# optimize the parameters for a few epochs with ADAM on time span
# Setup and run the optimization
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p_nn)
-res = Optimization.solve(optprob, ADAM(myparameters.lr), callback=visualization_callback, maxiters=100)
+res = Optimization.solve(optprob, ADAM(myparameters.lr), callback = visualization_callback,
+ maxiters = 100)
# plot optimized control
-visualization_callback(res.u, loss(res.u); doplot=true)
+visualization_callback(res.u, loss(res.u); doplot = true)
```
## Step-by-step description
### Load packages
+
```@example sdecontrol
using DiffEqFlux
using SciMLSensitivity
@@ -312,7 +313,9 @@ using Plots
```
### Parameters
+
We define the parameters of the qubit and hyperparameters of the training process.
+
```@example sdecontrol
lr = 0.01f0
epochs = 100
@@ -325,8 +328,8 @@ dt = 0.0005f0
tinterval = 0.05f0
tstart = 0.0f0
Nintervals = 20 # total number of intervals, total time = t_interval*Nintervals
-tspan = (tstart,tinterval*Nintervals)
-ts = Array(tstart:dt:(Nintervals*tinterval+dt)) # time array for noise grid
+tspan = (tstart, tinterval * Nintervals)
+ts = Array(tstart:dt:(Nintervals * tinterval + dt)) # time array for noise grid
# Hamiltonian parameters
Δ = 20.0f0
@@ -336,75 +339,85 @@ ts = Array(tstart:dt:(Nintervals*tinterval+dt)) # time array for noise grid
# loss hyperparameters
C1 = Float32(1.0) # evolution state fidelity
-struct Parameters{flType,intType,tType}
- lr::flType
- epochs::intType
- numtraj::intType
- numtrajplot::intType
- dt::flType
- tinterval::flType
- tspan::tType
- Nintervals::intType
- ts::Vector{flType}
- Δ::flType
- Ωmax::flType
- κ::flType
- C1::flType
+struct Parameters{flType, intType, tType}
+ lr::flType
+ epochs::intType
+ numtraj::intType
+ numtrajplot::intType
+ dt::flType
+ tinterval::flType
+ tspan::tType
+ Nintervals::intType
+ ts::Vector{flType}
+ Δ::flType
+ Ωmax::flType
+ κ::flType
+ C1::flType
end
-myparameters = Parameters{typeof(dt),typeof(numtraj), typeof(tspan)}(
- lr, epochs, numtraj, numtrajplot, dt, tinterval, tspan, Nintervals, ts,
- Δ, Ωmax, κ, C1)
+myparameters = Parameters{typeof(dt), typeof(numtraj), typeof(tspan)}(lr, epochs, numtraj,
+ numtrajplot, dt,
+ tinterval, tspan,
+ Nintervals, ts,
+ Δ, Ωmax, κ, C1)
```
In plain terms, the quantities that were defined are:
-- `lr` = learning rate of the optimizer
-- `epochs` = number of epochs in the training process
-- `numtraj` = number of simulated trajectories in the training process
-- `numtrajplot` = number of simulated trajectories to visualize the performance
-- `dt` = time step for solver (initial `dt` if adaptive)
-- `tinterval` = time spacing between checkpoints
-- `tspan` = time span
-- `Nintervals` = number of checkpoints
-- `ts` = discretization of the entire time interval, used for `NoiseGrid`
-- `Δ` = detuning between the qubit and the laser
-- `Ωmax` = maximum frequency of the control laser
-- `κ` = decay rate
-- `C1` = loss function hyperparameter
+ - `lr` = learning rate of the optimizer
+ - `epochs` = number of epochs in the training process
+ - `numtraj` = number of simulated trajectories in the training process
+ - `numtrajplot` = number of simulated trajectories to visualize the performance
+ - `dt` = time step for solver (initial `dt` if adaptive)
+ - `tinterval` = time spacing between checkpoints
+ - `tspan` = time span
+ - `Nintervals` = number of checkpoints
+ - `ts` = discretization of the entire time interval, used for `NoiseGrid`
+ - `Δ` = detuning between the qubit and the laser
+ - `Ωmax` = maximum frequency of the control laser
+ - `κ` = decay rate
+ - `C1` = loss function hyperparameter
### Controller
+
We use a neural network to control the parameter Ω(t). Alternatively, one could
also, e.g., use [tensor layers](https://docs.sciml.ai/DiffEqFlux/stable/layers/TensorLayer/), Flux.jl, or Lux.jl.
```@example sdecontrol
# state-aware
-nn = FastChain(
- FastDense(4, 32, relu),
- FastDense(32, 1, tanh))
+nn = FastChain(FastDense(4, 32, relu),
+ FastDense(32, 1, tanh))
p_nn = initial_params(nn) # random initial parameters
```
### Initial state
+
We prepare `n_par` initial states, uniformly distributed over the Bloch sphere.
To avoid complex numbers in our simulations, we split the state of the qubit
+
```math
ψ(t) = c_e(t) (1,0) + c_d(t) (0,1)
```
+
into its real and imaginary part.
```@example sdecontrol
# initial state anywhere on the Bloch sphere
function prepare_initial(dt, n_par)
- # shape 4 x n_par
- # input number of parallel realizations and dt for type inference
- # random position on the Bloch sphere
- theta = acos.(2*rand(typeof(dt),n_par).-1) # uniform sampling for cos(theta) between -1 and 1
- phi = rand(typeof(dt),n_par)*2*pi # uniform sampling for phi between 0 and 2pi
- # real and imaginary parts ceR, cdR, ceI, cdI
- u0 = [cos.(theta/2), sin.(theta/2).*cos.(phi), false*theta, sin.(theta/2).*sin.(phi)]
- return vcat(transpose.(u0)...) # build matrix
+ # shape 4 x n_par
+ # input number of parallel realizations and dt for type inference
+ # random position on the Bloch sphere
+ theta = acos.(2 * rand(typeof(dt), n_par) .- 1) # uniform sampling for cos(theta) between -1 and 1
+ phi = rand(typeof(dt), n_par) * 2 * pi # uniform sampling for phi between 0 and 2pi
+ # real and imaginary parts ceR, cdR, ceI, cdI
+ u0 = [
+ cos.(theta / 2),
+ sin.(theta / 2) .* cos.(phi),
+ false * theta,
+ sin.(theta / 2) .* sin.(phi),
+ ]
+ return vcat(transpose.(u0)...) # build matrix
end
# target state
@@ -414,6 +427,7 @@ u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
```
### Defining the SDE
+
We define the drift and diffusion term of the qubit. The SDE doesn't preserve the
norm of the quantum state. To ensure the normalization of the state, we add a
`DiscreteCallback` after each time step. Further, we use a NoiseGrid
@@ -424,63 +438,63 @@ continuously updated.
```@example sdecontrol
# Define SDE
-function qubit_drift!(du,u,p,t)
- # expansion coefficients |Ψ> = ce |e> + cd |d>
- ceR, cdR, ceI, cdI = u # real and imaginary parts
-
- # Δ: atomic frequency
- # Ω: Rabi frequency for field in x direction
- # κ: spontaneous emission
- Δ, Ωmax, κ = p[end-2:end]
- nn_weights = p[1:end-3]
- Ω = (nn(u, nn_weights).*Ωmax)[1]
-
- @inbounds begin
- du[1] = 1//2*(ceI*Δ-ceR*κ+cdI*Ω)
- du[2] = -cdI*Δ/2 + 1*ceR*(cdI*ceI+cdR*ceR)*κ+ceI*Ω/2
- du[3] = 1//2*(-ceR*Δ-ceI*κ-cdR*Ω)
- du[4] = cdR*Δ/2 + 1*ceI*(cdI*ceI+cdR*ceR)*κ-ceR*Ω/2
- end
- return nothing
+function qubit_drift!(du, u, p, t)
+ # expansion coefficients |Ψ> = ce |e> + cd |d>
+ ceR, cdR, ceI, cdI = u # real and imaginary parts
+
+ # Δ: atomic frequency
+ # Ω: Rabi frequency for field in x direction
+ # κ: spontaneous emission
+ Δ, Ωmax, κ = p[(end - 2):end]
+ nn_weights = p[1:(end - 3)]
+ Ω = (nn(u, nn_weights) .* Ωmax)[1]
+
+ @inbounds begin
+ du[1] = 1 // 2 * (ceI * Δ - ceR * κ + cdI * Ω)
+ du[2] = -cdI * Δ / 2 + 1 * ceR * (cdI * ceI + cdR * ceR) * κ + ceI * Ω / 2
+ du[3] = 1 // 2 * (-ceR * Δ - ceI * κ - cdR * Ω)
+ du[4] = cdR * Δ / 2 + 1 * ceI * (cdI * ceI + cdR * ceR) * κ - ceR * Ω / 2
+ end
+ return nothing
end
-function qubit_diffusion!(du,u,p,t)
- ceR, cdR, ceI, cdI = u # real and imaginary parts
+function qubit_diffusion!(du, u, p, t)
+ ceR, cdR, ceI, cdI = u # real and imaginary parts
- κ = p[end]
+ κ = p[end]
- du .= false
+ du .= false
- @inbounds begin
- #du[1] = zero(ceR)
- du[2] += sqrt(κ)*ceR
- #du[3] = zero(ceR)
- du[4] += sqrt(κ)*ceI
- end
- return nothing
+ @inbounds begin
+ #du[1] = zero(ceR)
+ du[2] += sqrt(κ) * ceR
+ #du[3] = zero(ceR)
+ du[4] += sqrt(κ) * ceI
+ end
+ return nothing
end
# normalization callback
-condition(u,t,integrator) = true
+condition(u, t, integrator) = true
function affect!(integrator)
- integrator.u.=integrator.u/norm(integrator.u)
+ integrator.u .= integrator.u / norm(integrator.u)
end
-callback = DiscreteCallback(condition,affect!,save_positions=(false,false))
+callback = DiscreteCallback(condition, affect!, save_positions = (false, false))
-CreateGrid(t,W1) = NoiseGrid(t,W1)
+CreateGrid(t, W1) = NoiseGrid(t, W1)
Zygote.@nograd CreateGrid #avoid taking grads of this function
# set scalar random process
-W = sqrt(myparameters.dt)*randn(typeof(myparameters.dt),size(myparameters.ts)) #for 1 trajectory
-W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
-NG = CreateGrid(myparameters.ts,W1)
+W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+NG = CreateGrid(myparameters.ts, W1)
# get control pulses
p_all = [p_nn; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
# define SDE problem
-prob = SDEProblem{true}(qubit_drift!, qubit_diffusion!, vec(u0[:,1]), myparameters.tspan, p_all,
- callback=callback, noise=NG
- )
+prob = SDEProblem{true}(qubit_drift!, qubit_diffusion!, vec(u0[:, 1]), myparameters.tspan,
+ p_all,
+ callback = callback, noise = NG)
```
### Compute loss function
@@ -495,130 +509,126 @@ parallel ensemble simulation docs](https://docs.sciml.ai/DiffEqDocs/stable/featu
for a description of the available ensemble algorithms. To optimize only the parameters
of the neural network, we use `pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]`
-``` @example sdecontrol
+```@example sdecontrol
# compute loss
-function g(u,p,t)
- ceR = @view u[1,:,:]
- cdR = @view u[2,:,:]
- ceI = @view u[3,:,:]
- cdI = @view u[4,:,:]
- p[1]*mean((cdR.^2 + cdI.^2) ./ (ceR.^2 + cdR.^2 + ceI.^2 + cdI.^2))
+function g(u, p, t)
+ ceR = @view u[1, :, :]
+ cdR = @view u[2, :, :]
+ ceI = @view u[3, :, :]
+ cdI = @view u[4, :, :]
+ p[1] * mean((cdR .^ 2 + cdI .^ 2) ./ (ceR .^ 2 + cdR .^ 2 + ceI .^ 2 + cdI .^ 2))
end
-function loss(p; alg=EM(), sensealg=BacksolveAdjoint(autojacvec=ReverseDiffVJP()))
-
- pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
- u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
-
- function prob_func(prob, i, repeat)
- # prepare initial state and applied control pulse
- u0tmp = deepcopy(vec(u0[:, i]))
- W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
- W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
- NG = CreateGrid(myparameters.ts, W1)
-
- remake(prob,
- p=pars,
- u0=u0tmp,
- callback=callback,
- noise=NG)
- end
-
- ensembleprob = EnsembleProblem(prob,
- prob_func=prob_func,
- safetycopy=true
- )
-
- _sol = solve(ensembleprob, alg, EnsembleThreads(),
- sensealg=sensealg,
- saveat=myparameters.tinterval,
- dt=myparameters.dt,
- adaptive=false,
- trajectories=myparameters.numtraj, batch_size=myparameters.numtraj)
- A = convert(Array, _sol)
-
- l = g(A, [myparameters.C1], nothing)
- # returns loss value
- return l
+function loss(p; alg = EM(), sensealg = BacksolveAdjoint(autojacvec = ReverseDiffVJP()))
+ pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
+ u0 = prepare_initial(myparameters.dt, myparameters.numtraj)
+
+ function prob_func(prob, i, repeat)
+ # prepare initial state and applied control pulse
+ u0tmp = deepcopy(vec(u0[:, i]))
+ W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+ W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+ NG = CreateGrid(myparameters.ts, W1)
+
+ remake(prob,
+ p = pars,
+ u0 = u0tmp,
+ callback = callback,
+ noise = NG)
+ end
+
+ ensembleprob = EnsembleProblem(prob,
+ prob_func = prob_func,
+ safetycopy = true)
+
+ _sol = solve(ensembleprob, alg, EnsembleThreads(),
+ sensealg = sensealg,
+ saveat = myparameters.tinterval,
+ dt = myparameters.dt,
+ adaptive = false,
+ trajectories = myparameters.numtraj, batch_size = myparameters.numtraj)
+ A = convert(Array, _sol)
+
+ l = g(A, [myparameters.C1], nothing)
+ # returns loss value
+ return l
end
```
-
### Visualization
+
To visualize the performance of the controller, we plot the mean value and
standard deviation of the fidelity of a bunch of trajectories (`myparameters.numtrajplot`) as
a function of the time steps at which loss values are computed.
```@example sdecontrol
-function visualize(p; alg=EM())
-
- u0 = prepare_initial(myparameters.dt, myparameters.numtrajplot)
- pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
-
- function prob_func(prob, i, repeat)
- # prepare initial state and applied control pulse
- u0tmp = deepcopy(vec(u0[:, i]))
- W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
- W1 = cumsum([zero(myparameters.dt); W[1:end-1]], dims=1)
- NG = CreateGrid(myparameters.ts, W1)
-
- remake(prob,
- p=pars,
- u0=u0tmp,
- callback=callback,
- noise=NG)
- end
-
- ensembleprob = EnsembleProblem(prob,
- prob_func=prob_func,
- safetycopy=true
- )
-
- u = solve(ensembleprob, alg, EnsembleThreads(),
- saveat=myparameters.tinterval,
- dt=myparameters.dt,
- adaptive=false, #abstol=1e-6, reltol=1e-6,
- trajectories=myparameters.numtrajplot, batch_size=myparameters.numtrajplot)
-
-
- ceR = @view u[1, :, :]
- cdR = @view u[2, :, :]
- ceI = @view u[3, :, :]
- cdI = @view u[4, :, :]
- infidelity = @. (cdR^2 + cdI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
- meaninfidelity = mean(infidelity)
- loss = myparameters.C1 * meaninfidelity
-
- @info "Loss: " loss
-
- fidelity = @. (ceR^2 + ceI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
-
- mf = mean(fidelity, dims=2)[:]
- sf = std(fidelity, dims=2)[:]
-
- pl1 = plot(0:myparameters.Nintervals, mf,
- ribbon=sf,
- ylim=(0, 1), xlim=(0, myparameters.Nintervals),
- c=1, lw=1.5, xlabel="steps i", ylabel="Fidelity", legend=false)
-
- pl = plot(pl1, legend=false, size=(400, 360))
- return pl, loss
+function visualize(p; alg = EM())
+ u0 = prepare_initial(myparameters.dt, myparameters.numtrajplot)
+ pars = [p; myparameters.Δ; myparameters.Ωmax; myparameters.κ]
+
+ function prob_func(prob, i, repeat)
+ # prepare initial state and applied control pulse
+ u0tmp = deepcopy(vec(u0[:, i]))
+ W = sqrt(myparameters.dt) * randn(typeof(myparameters.dt), size(myparameters.ts)) #for 1 trajectory
+ W1 = cumsum([zero(myparameters.dt); W[1:(end - 1)]], dims = 1)
+ NG = CreateGrid(myparameters.ts, W1)
+
+ remake(prob,
+ p = pars,
+ u0 = u0tmp,
+ callback = callback,
+ noise = NG)
+ end
+
+ ensembleprob = EnsembleProblem(prob,
+ prob_func = prob_func,
+ safetycopy = true)
+
+ u = solve(ensembleprob, alg, EnsembleThreads(),
+ saveat = myparameters.tinterval,
+ dt = myparameters.dt,
+ adaptive = false, #abstol=1e-6, reltol=1e-6,
+ trajectories = myparameters.numtrajplot,
+ batch_size = myparameters.numtrajplot)
+
+ ceR = @view u[1, :, :]
+ cdR = @view u[2, :, :]
+ ceI = @view u[3, :, :]
+ cdI = @view u[4, :, :]
+ infidelity = @. (cdR^2 + cdI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
+ meaninfidelity = mean(infidelity)
+ loss = myparameters.C1 * meaninfidelity
+
+ @info "Loss: " loss
+
+ fidelity = @. (ceR^2 + ceI^2) / (ceR^2 + cdR^2 + ceI^2 + cdI^2)
+
+ mf = mean(fidelity, dims = 2)[:]
+ sf = std(fidelity, dims = 2)[:]
+
+ pl1 = plot(0:(myparameters.Nintervals), mf,
+ ribbon = sf,
+ ylim = (0, 1), xlim = (0, myparameters.Nintervals),
+ c = 1, lw = 1.5, xlabel = "steps i", ylabel = "Fidelity", legend = false)
+
+ pl = plot(pl1, legend = false, size = (400, 360))
+ return pl, loss
end
# callback to visualize training
-visualization_callback = function (p, l; doplot=false)
- println(l)
+visualization_callback = function (p, l; doplot = false)
+ println(l)
- if doplot
- pl, _ = visualize(p)
- display(pl)
- end
+ if doplot
+ pl, _ = visualize(p)
+ display(pl)
+ end
- return false
+ return false
end
```
-
### Training
+
We use the `ADAM` optimizer to optimize the parameters of the neural network.
In each epoch, we draw new initial quantum states, compute the forward evolution,
and, subsequently, the gradients of the loss function with respect to the parameters
@@ -632,18 +642,18 @@ is computed under the hood in the SciMLSensitivity package.
# optimize the parameters for a few epochs with ADAM on time span
# Setup and run the optimization
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p)->loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p_nn)
-res = Optimization.solve(optprob, ADAM(myparameters.lr), callback=visualization_callback, maxiters=100)
+res = Optimization.solve(optprob, ADAM(myparameters.lr), callback = visualization_callback,
+ maxiters = 100)
# plot optimized control
-visualization_callback(res.u, loss(res.u); doplot=true)
+visualization_callback(res.u, loss(res.u); doplot = true)
```
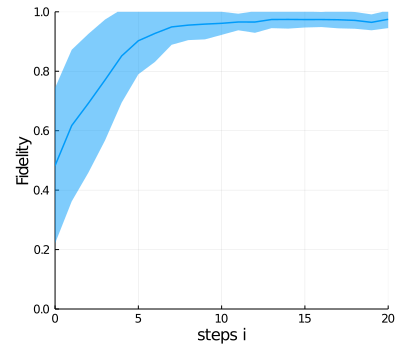
-
## References
[1] Schäfer, Frank, Pavel Sekatski, Martin Koppenhöfer, Christoph Bruder, and Michal Kloc. "Control of stochastic quantum dynamics by differentiable programming." Machine Learning: Science and Technology 2, no. 3 (2021): 035004.
diff --git a/docs/src/examples/sde/optimization_sde.md b/docs/src/examples/sde/optimization_sde.md
index f6f306eed..e8c915cb2 100644
--- a/docs/src/examples/sde/optimization_sde.md
+++ b/docs/src/examples/sde/optimization_sde.md
@@ -17,23 +17,23 @@ solution, so we need a sensible data source.
```@example sde
using DifferentialEquations, SciMLSensitivity, Plots
-function lotka_volterra!(du,u,p,t)
- x,y = u
- α,β,γ,δ = p
- du[1] = dx = α*x - β*x*y
- du[2] = dy = δ*x*y - γ*y
+function lotka_volterra!(du, u, p, t)
+ x, y = u
+ α, β, γ, δ = p
+ du[1] = dx = α * x - β * x * y
+ du[2] = dy = δ * x * y - γ * y
end
-u0 = [1.0,1.0]
-tspan = (0.0,10.0)
+u0 = [1.0, 1.0]
+tspan = (0.0, 10.0)
-function multiplicative_noise!(du,u,p,t)
- x,y = u
- du[1] = p[5]*x
- du[2] = p[6]*y
+function multiplicative_noise!(du, u, p, t)
+ x, y = u
+ du[1] = p[5] * x
+ du[2] = p[6] * y
end
-p = [1.5,1.0,3.0,1.0,0.3,0.3]
+p = [1.5, 1.0, 3.0, 1.0, 0.3, 0.3]
-prob = SDEProblem(lotka_volterra!,multiplicative_noise!,u0,tspan,p)
+prob = SDEProblem(lotka_volterra!, multiplicative_noise!, u0, tspan, p)
sol = solve(prob)
plot(sol)
```
@@ -48,9 +48,9 @@ scenario, we will generate 10,000 trajectories from the SDE to build our dataset
```@example sde
using Statistics
ensembleprob = EnsembleProblem(prob)
-@time sol = solve(ensembleprob,SOSRI(),saveat=0.1,trajectories=10_000)
-truemean = mean(sol,dims=3)[:,:]
-truevar = var(sol,dims=3)[:,:]
+@time sol = solve(ensembleprob, SOSRI(), saveat = 0.1, trajectories = 10_000)
+truemean = mean(sol, dims = 3)[:, :]
+truevar = var(sol, dims = 3)[:, :]
```
From here, we wish to utilize the method of moments to fit the SDE's parameters.
@@ -60,24 +60,25 @@ then plot the evolution of the means and variances to verify the fit. For exampl
```@example sde
function loss(p)
- tmp_prob = remake(prob,p=p)
- ensembleprob = EnsembleProblem(tmp_prob)
- tmp_sol = solve(ensembleprob,SOSRI(),saveat=0.1,trajectories=1000)
- arrsol = Array(tmp_sol)
- sum(abs2,truemean - mean(arrsol,dims=3)) + 0.1sum(abs2,truevar - var(arrsol,dims=3)),arrsol
+ tmp_prob = remake(prob, p = p)
+ ensembleprob = EnsembleProblem(tmp_prob)
+ tmp_sol = solve(ensembleprob, SOSRI(), saveat = 0.1, trajectories = 1000)
+ arrsol = Array(tmp_sol)
+ sum(abs2, truemean - mean(arrsol, dims = 3)) +
+ 0.1sum(abs2, truevar - var(arrsol, dims = 3)), arrsol
end
-function cb2(p,l,arrsol)
- @show p,l
- means = mean(arrsol,dims=3)[:,:]
- vars = var(arrsol,dims=3)[:,:]
- p1 = plot(sol[1].t,means',lw=5)
- scatter!(p1,sol[1].t,truemean')
- p2 = plot(sol[1].t,vars',lw=5)
- scatter!(p2,sol[1].t,truevar')
- p = plot(p1,p2,layout = (2,1))
- display(p)
- false
+function cb2(p, l, arrsol)
+ @show p, l
+ means = mean(arrsol, dims = 3)[:, :]
+ vars = var(arrsol, dims = 3)[:, :]
+ p1 = plot(sol[1].t, means', lw = 5)
+ scatter!(p1, sol[1].t, truemean')
+ p2 = plot(sol[1].t, vars', lw = 5)
+ scatter!(p2, sol[1].t, truevar')
+ p = plot(p1, p2, layout = (2, 1))
+ display(p)
+ false
end
```
@@ -85,11 +86,11 @@ We can then use `Optimization.solve` to fit the SDE:
```@example sde
using Optimization, Zygote, OptimizationFlux
-pinit = [1.2,0.8,2.5,0.8,0.1,0.1]
+pinit = [1.2, 0.8, 2.5, 0.8, 0.1, 0.1]
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p) -> loss(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss(x), adtype)
optprob = Optimization.OptimizationProblem(optf, pinit)
-@time res = Optimization.solve(optprob,ADAM(0.05),callback=cb2,maxiters = 100)
+@time res = Optimization.solve(optprob, ADAM(0.05), callback = cb2, maxiters = 100)
```
Notice that **both the parameters of the deterministic drift equations and the
@@ -122,29 +123,28 @@ solution to be close to the constant 1.
using DifferentialEquations, DiffEqFlux, Optimization, OptimizationFlux, Plots
function lotka_volterra!(du, u, p, t)
- x, y = u
- α, β, δ, γ = p
- du[1] = dx = α*x - β*x*y
- du[2] = dy = -δ*y + γ*x*y
+ x, y = u
+ α, β, δ, γ = p
+ du[1] = dx = α * x - β * x * y
+ du[2] = dy = -δ * y + γ * x * y
end
function lotka_volterra_noise!(du, u, p, t)
- du[1] = 0.1u[1]
- du[2] = 0.1u[2]
+ du[1] = 0.1u[1]
+ du[2] = 0.1u[2]
end
-u0 = [1.0,1.0]
+u0 = [1.0, 1.0]
tspan = (0.0, 10.0)
p = [2.2, 1.0, 2.0, 0.4]
prob_sde = SDEProblem(lotka_volterra!, lotka_volterra_noise!, u0, tspan)
-
function predict_sde(p)
- return Array(solve(prob_sde, SOSRI(), p=p,
- sensealg = ForwardDiffSensitivity(), saveat = 0.1))
+ return Array(solve(prob_sde, SOSRI(), p = p,
+ sensealg = ForwardDiffSensitivity(), saveat = 0.1))
end
-loss_sde(p) = sum(abs2, x-1 for x in predict_sde(p))
+loss_sde(p) = sum(abs2, x - 1 for x in predict_sde(p))
```
For this training process, because the loss function is stochastic, we will use
@@ -155,11 +155,11 @@ like:
```@example sde
callback = function (p, l)
- display(l)
- remade_solution = solve(remake(prob_sde, p = p), SOSRI(), saveat = 0.1)
- plt = plot(remade_solution, ylim = (0, 6))
- display(plt)
- return false
+ display(l)
+ remade_solution = solve(remake(prob_sde, p = p), SOSRI(), saveat = 0.1)
+ plt = plot(remade_solution, ylim = (0, 6))
+ display(plt)
+ return false
end
```
@@ -167,11 +167,11 @@ Let's optimize
```@example sde
adtype = Optimization.AutoZygote()
-optf = Optimization.OptimizationFunction((x,p) -> loss_sde(x), adtype)
+optf = Optimization.OptimizationFunction((x, p) -> loss_sde(x), adtype)
optprob = Optimization.OptimizationProblem(optf, p)
result_sde = Optimization.solve(optprob, ADAM(0.1),
- callback = callback, maxiters = 100)
+ callback = callback, maxiters = 100)
```
diff --git a/docs/src/getting_started.md b/docs/src/getting_started.md
index a08555a77..f0cb3f016 100644
--- a/docs/src/getting_started.md
+++ b/docs/src/getting_started.md
@@ -1,10 +1,10 @@
# [Getting Started with SciMLSensitivity: Differentiating ODE Solutions](@id auto_diff)
!!! warn
-
- This tutorial assumes familiarity with DifferentialEquations.jl.
- If you are not familiar with DifferentialEquations.jl, please consult
- [the DifferentialEquations.jl documentation](https://docs.sciml.ai/DiffEqDocs/stable/).
+
+ This tutorial assumes familiarity with DifferentialEquations.jl.
+ If you are not familiar with DifferentialEquations.jl, please consult
+ [the DifferentialEquations.jl documentation](https://docs.sciml.ai/DiffEqDocs/stable/).
SciMLSensitivity.jl is a tool for obtaining derivatives of equation solvers,
such as differential equation solvers. These can be used in many ways, such as
@@ -14,7 +14,7 @@ tutorial, we will show how to make use of the tooling in SciMLSensitivity.jl
to differentiate the ODE solvers.
!!! note
-
+
SciMLSensitivity.jl applies to all equation solvers of the SciML ecosystem,
such as linear solvers, nonlinear solvers, nonlinear optimization,
and more. This tutorial focuses on differential equations, so please see
@@ -30,13 +30,14 @@ Lotka-Volterra equation. This is done via DifferentialEquations.jl using:
```@example diffode
using DifferentialEquations
-function lotka_volterra!(du,u,p,t)
- du[1] = dx = p[1]*u[1] - p[2]*u[1]*u[2]
- du[2] = dy = -p[3]*u[2] + p[4]*u[1]*u[2]
+function lotka_volterra!(du, u, p, t)
+ du[1] = dx = p[1] * u[1] - p[2] * u[1] * u[2]
+ du[2] = dy = -p[3] * u[2] + p[4] * u[1] * u[2]
end
-p = [1.5,1.0,3.0,1.0]; u0 = [1.0;1.0]
-prob = ODEProblem(lotka_volterra!,u0,(0.0,10.0),p)
-sol = solve(prob,Tsit5(),reltol=1e-6,abstol=1e-6)
+p = [1.5, 1.0, 3.0, 1.0];
+u0 = [1.0; 1.0];
+prob = ODEProblem(lotka_volterra!, u0, (0.0, 10.0), p)
+sol = solve(prob, Tsit5(), reltol = 1e-6, abstol = 1e-6)
```
Now let's differentiate the solution to this ODE using a few different automatic
@@ -46,28 +47,28 @@ differentiation methods.
Let's say we need the derivative of the solution with respect to the initial condition
`u0` and its parameters `p`. One of the simplest ways to do this is via ForwardDiff.jl.
-All one needs to do is to use
+All one needs to do is to use
[the ForwardDiff.jl library](https://juliadiff.org/ForwardDiff.jl/stable/) to differentiate
some function `f` which uses a differential equation `solve` inside of it. For example,
-let's say we want the derivative of the first component of the ODE solution with respect to
+let's say we want the derivative of the first component of the ODE solution with respect to
these quantities at evenly spaced time points of `dt = 1`. We can compute this via:
```@example diffode
using ForwardDiff
function f(x)
- _prob = remake(prob,u0=x[1:2],p=x[3:end])
- solve(_prob,Tsit5(),reltol=1e-6,abstol=1e-6,saveat=1)[1,:]
+ _prob = remake(prob, u0 = x[1:2], p = x[3:end])
+ solve(_prob, Tsit5(), reltol = 1e-6, abstol = 1e-6, saveat = 1)[1, :]
end
-x = [u0;p]
-dx = ForwardDiff.jacobian(f,x)
+x = [u0; p]
+dx = ForwardDiff.jacobian(f, x)
```
Let's dig into what this is saying a bit. `x` is a vector which concatenates the initial condition
and parameters, meaning that the first 2 values are the initial conditions and the last 4 are the
parameters. We use the `remake` function to build a function `f(x)` which uses these new initial
conditions and parameters to solve the differential equation and return the time series of the first
-component.
+component.
Then `ForwardDiff.jacobian(f,x)` computes the Jacobian of `f` with respect to `x`. The
output `dx[i,j]` corresponds to the derivative of the solution of the first component at time `t=j-1`
@@ -75,31 +76,31 @@ with respect to `x[i]`. For example, `dx[3,2]` is the derivative of the first co
solution at time `t=1` with respect to `p[1]`.
!!! note
-
- Since [the global error is 1-2 orders of magnitude higher than the local error](https://docs.sciml.ai/DiffEqDocs/stable/basics/faq/#What-does-tolerance-mean-and-how-much-error-should-I-expect), we use accuracies of 1e-6 (instead of the default 1e-3) to get reasonable sensitivities
+
+ Since [the global error is 1-2 orders of magnitude higher than the local error](https://docs.sciml.ai/DiffEqDocs/stable/basics/faq/#What-does-tolerance-mean-and-how-much-error-should-I-expect), we use accuracies of 1e-6 (instead of the default 1e-3) to get reasonable sensitivities
## Reverse-Mode Automatic Differentiation
[The `solve` function is automatically compatible with AD systems like Zygote.jl](https://docs.sciml.ai/SciMLSensitivity/stable/)
and thus there is no machinery that is necessary to use other than to put `solve` inside
-a function that is differentiated by Zygote. For example, the following computes the solution
-to an ODE and computes the gradient of a loss function (the sum of the ODE's output at each
+a function that is differentiated by Zygote. For example, the following computes the solution
+to an ODE and computes the gradient of a loss function (the sum of the ODE's output at each
timepoint with dt=0.1) via the adjoint method:
```@example diffode
using Zygote, SciMLSensitivity
-function sum_of_solution(u0,p)
- _prob = remake(prob,u0=u0,p=p)
- sum(solve(_prob,Tsit5(),reltol=1e-6,abstol=1e-6,saveat=0.1))
+function sum_of_solution(u0, p)
+ _prob = remake(prob, u0 = u0, p = p)
+ sum(solve(_prob, Tsit5(), reltol = 1e-6, abstol = 1e-6, saveat = 0.1))
end
-du01,dp1 = Zygote.gradient(sum_of_solution,u0,p)
+du01, dp1 = Zygote.gradient(sum_of_solution, u0, p)
```
Zygote.jl's automatic differentiation system is overloaded to allow SciMLSensitivity.jl
to redefine the way the derivatives are computed, allowing trade-offs between numerical
stability, memory, and compute performance, similar to how ODE solver algorithms are
-chosen.
+chosen.
### Choosing Sensitivity Algorithms
@@ -109,11 +110,12 @@ Let's demonstrate this by choosing the `QuadratureAdjoint` `sensealg` for the di
this system:
```@example diffode
-function sum_of_solution(u0,p)
- _prob = remake(prob,u0=u0,p=p)
- sum(solve(_prob,Tsit5(),reltol=1e-6,abstol=1e-6,saveat=0.1,sensealg=QuadratureAdjoint()))
+function sum_of_solution(u0, p)
+ _prob = remake(prob, u0 = u0, p = p)
+ sum(solve(_prob, Tsit5(), reltol = 1e-6, abstol = 1e-6, saveat = 0.1,
+ sensealg = QuadratureAdjoint()))
end
-du01,dp1 = Zygote.gradient(sum_of_solution,u0,p)
+du01, dp1 = Zygote.gradient(sum_of_solution, u0, p)
```
Here this computes the derivative of the output with respect to the initial
@@ -122,13 +124,14 @@ using the `QuadratureAdjoint()`. For more information on the choices of sensitiv
algorithms, see the [reference documentation in choosing sensitivity algorithms](@ref sensitivity_diffeq).
!!! note
+
ForwardDiff.jl's automatic differentiation system ignores the sensitivity algorithms.
## When Should You Use Forward or Reverse Mode?
Good question! The simple answer is, if you are differentiating a system of
fewer than 100 equations, use forward-mode, otherwise reverse-mode. But it can
-be a lot more complicated than that! For more information, see the
+be a lot more complicated than that! For more information, see the
[reference documentation in choosing sensitivity algorithms](@ref sensitivity_diffeq).
## And that is it! Where should you go from here?
@@ -136,5 +139,5 @@ be a lot more complicated than that! For more information, see the
That's all there is to the basics of differentiating the ODE solvers with SciMLSensitivity.jl.
That said, check out the following tutorials to dig into more detail:
-* See the [ODE parameter estimation tutorial](@ref odeparamestim) to learn how to fit the parameters of ODE systems
-* See the [direct sensitivity tutorial](@ref direct_sensitivity) to dig into the lower level API for more performance
\ No newline at end of file
+ - See the [ODE parameter estimation tutorial](@ref odeparamestim) to learn how to fit the parameters of ODE systems
+ - See the [direct sensitivity tutorial](@ref direct_sensitivity) to dig into the lower level API for more performance
diff --git a/docs/src/index.md b/docs/src/index.md
index 49babf6c5..dcb1d1559 100644
--- a/docs/src/index.md
+++ b/docs/src/index.md
@@ -11,20 +11,20 @@ as easy as possible without losing efficiency.
Thus, what SciMLSensitivity.jl provides is:
-- Automatic differentiation overloads for improving the performance and flexibility
- of AD calls over `solve`.
-- A lower level direct interface for defining forward sensitivity and adjoint problems
- to allow for minimal overhead and maximal performance.
-- A bunch of tutorials, documentation, and test cases for this combination
- with parameter estimation (data fitting / model calibration), neural network
- libraries and GPUs.
+ - Automatic differentiation overloads for improving the performance and flexibility
+ of AD calls over `solve`.
+ - A lower level direct interface for defining forward sensitivity and adjoint problems
+ to allow for minimal overhead and maximal performance.
+ - A bunch of tutorials, documentation, and test cases for this combination
+ with parameter estimation (data fitting / model calibration), neural network
+ libraries and GPUs.
!!! note
-
+
This documentation assumes familiarity with the solver packages for the respective problem
types. If one is not familiar with the solver packages, please consult the documentation
- for pieces like [DifferentialEquations.jl](https://docs.sciml.ai/DiffEqDocs/stable/),
- [NonlinearSolve.jl](https://docs.sciml.ai/NonlinearSolve/stable/),
+ for pieces like [DifferentialEquations.jl](https://docs.sciml.ai/DiffEqDocs/stable/),
+ [NonlinearSolve.jl](https://docs.sciml.ai/NonlinearSolve/stable/),
[LinearSolve.jl](https://docs.sciml.ai/LinearSolve/stable/), etc. first.
## Installation
@@ -41,17 +41,17 @@ Pkg.add("SciMLSensitivity")
The highest level interface is provided by the function `solve`:
```julia
-solve(prob,args...;sensealg=InterpolatingAdjoint(),
- checkpoints=sol.t,kwargs...)
+solve(prob, args...; sensealg = InterpolatingAdjoint(),
+ checkpoints = sol.t, kwargs...)
```
`solve` is fully compatible with automatic differentiation libraries
like:
-- [Zygote.jl](https://fluxml.ai/Zygote.jl/stable/)
-- [ReverseDiff.jl](https://juliadiff.org/ReverseDiff.jl/)
-- [Tracker.jl](https://github.com/FluxML/Tracker.jl)
-- [ForwardDiff.jl](https://juliadiff.org/ForwardDiff.jl/stable/)
+ - [Zygote.jl](https://fluxml.ai/Zygote.jl/stable/)
+ - [ReverseDiff.jl](https://juliadiff.org/ReverseDiff.jl/)
+ - [Tracker.jl](https://github.com/FluxML/Tracker.jl)
+ - [ForwardDiff.jl](https://juliadiff.org/ForwardDiff.jl/stable/)
and will automatically replace any calculations of the solution's derivative
with a fast method. The keyword argument `sensealg` controls the dispatch to the
@@ -61,48 +61,54 @@ interpolations unless `sensealg=DiffEqBase.SensitivityADPassThrough()`
is used, i.e. going back to the AD mechanism.
!!! note
-
+
The behavior of ForwardDiff.jl is different from the other automatic differentiation libraries mentioned above.
The `sensealg` keyword is ignored. Instead, the differential equations are solved using `Dual` numbers for `u0` and `p`.
If only `p` is perturbed in the sensitivity analysis, but not `u0`, the state is still implemented as a `Dual` number.
ForwardDiff.jl will thus not dispatch into continuous forward nor adjoint sensitivity analysis even if a `sensealg` is provided.
-
+
## Equation Scope
-SciMLSensitivity.jl supports all the equation types of the
+SciMLSensitivity.jl supports all the equation types of the
[SciML Common Interface](https://docs.sciml.ai/SciMLBase/stable/), extending the problem
types by adding overloads for automatic differentiation to improve the performance
and flexibility of the differentiation system. This includes:
-- Linear systems (`LinearProblem`)
- - Direct methods for dense and sparse
- - Iterative solvers with preconditioning
-- Nonlinear Systems (`NonlinearProblem`)
- - Systems of nonlinear equations
- - Scalar bracketing systems
-- Integrals (quadrature) (`QuadratureProblem`)
-- Differential Equations
- - Discrete equations (function maps, discrete stochastic (Gillespie/Markov)
- simulations) (`DiscreteProblem`)
- - Ordinary differential equations (ODEs) (`ODEProblem`)
- - Split and Partitioned ODEs (Symplectic integrators, IMEX Methods) (`SplitODEProblem`)
- - Stochastic ordinary differential equations (SODEs or SDEs) (`SDEProblem`)
- - Stochastic differential-algebraic equations (SDAEs) (`SDEProblem` with mass matrices)
- - Random differential equations (RODEs or RDEs) (`RODEProblem`)
- - Differential algebraic equations (DAEs) (`DAEProblem` and `ODEProblem` with mass matrices)
- - Delay differential equations (DDEs) (`DDEProblem`)
- - Neutral, retarded, and algebraic delay differential equations (NDDEs, RDDEs, and DDAEs)
- - Stochastic delay differential equations (SDDEs) (`SDDEProblem`)
- - Experimental support for stochastic neutral, retarded, and algebraic delay differential equations (SNDDEs, SRDDEs, and SDDAEs)
- - Mixed discrete and continuous equations (Hybrid Equations, Jump Diffusions) (`DEProblem`s with callbacks)
-- Optimization (`OptimizationProblem`)
- - Nonlinear (constrained) optimization
-- (Stochastic/Delay/Differential-Algebraic) Partial Differential Equations (`PDESystem`)
- - Finite difference and finite volume methods
- - Interfaces to finite element methods
- - Physics-Informed Neural Networks (PINNs)
- - Integro-Differential Equations
- - Fractional Differential Equations
+ - Linear systems (`LinearProblem`)
+
+ + Direct methods for dense and sparse
+ + Iterative solvers with preconditioning
+
+ - Nonlinear Systems (`NonlinearProblem`)
+
+ + Systems of nonlinear equations
+ + Scalar bracketing systems
+ - Integrals (quadrature) (`QuadratureProblem`)
+ - Differential Equations
+
+ + Discrete equations (function maps, discrete stochastic (Gillespie/Markov)
+ simulations) (`DiscreteProblem`)
+ + Ordinary differential equations (ODEs) (`ODEProblem`)
+ + Split and Partitioned ODEs (Symplectic integrators, IMEX Methods) (`SplitODEProblem`)
+ + Stochastic ordinary differential equations (SODEs or SDEs) (`SDEProblem`)
+ + Stochastic differential-algebraic equations (SDAEs) (`SDEProblem` with mass matrices)
+ + Random differential equations (RODEs or RDEs) (`RODEProblem`)
+ + Differential algebraic equations (DAEs) (`DAEProblem` and `ODEProblem` with mass matrices)
+ + Delay differential equations (DDEs) (`DDEProblem`)
+ + Neutral, retarded, and algebraic delay differential equations (NDDEs, RDDEs, and DDAEs)
+ + Stochastic delay differential equations (SDDEs) (`SDDEProblem`)
+ + Experimental support for stochastic neutral, retarded, and algebraic delay differential equations (SNDDEs, SRDDEs, and SDDAEs)
+ + Mixed discrete and continuous equations (Hybrid Equations, Jump Diffusions) (`DEProblem`s with callbacks)
+ - Optimization (`OptimizationProblem`)
+
+ + Nonlinear (constrained) optimization
+ - (Stochastic/Delay/Differential-Algebraic) Partial Differential Equations (`PDESystem`)
+
+ + Finite difference and finite volume methods
+ + Interfaces to finite element methods
+ + Physics-Informed Neural Networks (PINNs)
+ + Integro-Differential Equations
+ + Fractional Differential Equations
## SciMLSensitivity and Universal Differential Equations
@@ -122,15 +128,15 @@ Learning](https://arxiv.org/abs/2001.04385).
You can efficiently use the package for:
-- Parameter estimation of scientific models (ODEs, SDEs, DDEs, DAEs, etc.)
-- Neural ODEs, Neural SDE, Neural DAEs, Neural DDEs, etc.
-- Nonlinear optimal control, including training neural controllers
-- (Stiff) universal ordinary differential equations (universal ODEs)
-- Universal stochastic differential equations (universal SDEs)
-- Universal delay differential equations (universal DDEs)
-- Universal partial differential equations (universal PDEs)
-- Universal jump stochastic differential equations (universal jump diffusions)
-- Hybrid universal differential equations (universal DEs with event handling)
+ - Parameter estimation of scientific models (ODEs, SDEs, DDEs, DAEs, etc.)
+ - Neural ODEs, Neural SDE, Neural DAEs, Neural DDEs, etc.
+ - Nonlinear optimal control, including training neural controllers
+ - (Stiff) universal ordinary differential equations (universal ODEs)
+ - Universal stochastic differential equations (universal SDEs)
+ - Universal delay differential equations (universal DDEs)
+ - Universal partial differential equations (universal PDEs)
+ - Universal jump stochastic differential equations (universal jump diffusions)
+ - Hybrid universal differential equations (universal DEs with event handling)
with high order, adaptive, implicit, GPU-accelerated, Newton-Krylov, etc.
methods. For examples, please refer to [the DiffEqFlux release blog
@@ -146,19 +152,21 @@ while use with CPUs uses specialized kernels for accelerating differential equat
Many training techniques are supported by this package, including:
-- Optimize-then-discretize (backsolve adjoints, checkpointed adjoints, quadrature adjoints)
-- Discretize-then-optimize (forward and reverse mode discrete sensitivity analysis)
- - This is a generalization of [ANODE](https://arxiv.org/pdf/1902.10298.pdf) and
- [ANODEv2](https://arxiv.org/pdf/1906.04596.pdf) to all
- [DifferentialEquations.jl ODE solvers](https://docs.sciml.ai/DiffEqDocs/stable/solvers/ode_solve/)
-- Hybrid approaches (adaptive time stepping + AD for adaptive discretize-then-optimize)
-- O(1) memory backprop of ODEs via BacksolveAdjoint, and Virtual Brownian Trees for O(1) backprop of SDEs
-- [Continuous adjoints for integral loss functions](@ref continuous_loss)
-- Probabilistic programming and variational inference on ODEs/SDEs/DAEs/DDEs/hybrid
- equations etc. is provided by integration with [Turing.jl](https://turing.ml/stable/docs/using-turing/)
- and [Gen.jl](https://github.com/probcomp/Gen.jl). Reproduce
- [variational loss functions](https://arxiv.org/abs/2001.01328) by plugging
- [composable libraries together](https://turing.ml/stable/tutorials/09-variational-inference/).
+ - Optimize-then-discretize (backsolve adjoints, checkpointed adjoints, quadrature adjoints)
+
+ - Discretize-then-optimize (forward and reverse mode discrete sensitivity analysis)
+
+ + This is a generalization of [ANODE](https://arxiv.org/pdf/1902.10298.pdf) and
+ [ANODEv2](https://arxiv.org/pdf/1906.04596.pdf) to all
+ [DifferentialEquations.jl ODE solvers](https://docs.sciml.ai/DiffEqDocs/stable/solvers/ode_solve/)
+ - Hybrid approaches (adaptive time stepping + AD for adaptive discretize-then-optimize)
+ - O(1) memory backprop of ODEs via BacksolveAdjoint, and Virtual Brownian Trees for O(1) backprop of SDEs
+ - [Continuous adjoints for integral loss functions](@ref continuous_loss)
+ - Probabilistic programming and variational inference on ODEs/SDEs/DAEs/DDEs/hybrid
+ equations etc. is provided by integration with [Turing.jl](https://turing.ml/stable/docs/using-turing/)
+ and [Gen.jl](https://github.com/probcomp/Gen.jl). Reproduce
+ [variational loss functions](https://arxiv.org/abs/2001.01328) by plugging
+ [composable libraries together](https://turing.ml/stable/tutorials/09-variational-inference/).
all while mixing forward mode and reverse mode approaches as appropriate for the
most speed. For more details on the adjoint sensitivity analysis methods for
@@ -166,25 +174,25 @@ computing fast gradients, see the [adjoints details page](@ref sensitivity_diffe
With this package, you can explore various ways to integrate the two methodologies:
-- Neural networks can be defined where the “activations” are nonlinear functions
- described by differential equations
-- Neural networks can be defined where some layers are ODE solves
-- ODEs can be defined where some terms are neural networks
-- Cost functions on ODEs can define neural networks
+ - Neural networks can be defined where the “activations” are nonlinear functions
+ described by differential equations
+ - Neural networks can be defined where some layers are ODE solves
+ - ODEs can be defined where some terms are neural networks
+ - Cost functions on ODEs can define neural networks
## Note on Modularity and Composability with Solvers
-Note that SciMLSensitivity.jl purely built on composable and modular infrastructure.
+Note that SciMLSensitivity.jl purely built on composable and modular infrastructure.
SciMLSensitivity provides high-level helper functions and documentation for the user, but the
code generation stack is modular and composes in many ways. For example, one can
use and swap out the ODE solver between any common interface compatible library, like:
-- Sundials.jl
-- OrdinaryDiffEq.jl
-- LSODA.jl
-- [IRKGaussLegendre.jl](https://github.com/mikelehu/IRKGaussLegendre.jl)
-- [SciPyDiffEq.jl](https://github.com/SciML/SciPyDiffEq.jl)
-- [… etc. many other choices!](https://docs.sciml.ai/DiffEqDocs/stable/solvers/ode_solve/)
+ - Sundials.jl
+ - OrdinaryDiffEq.jl
+ - LSODA.jl
+ - [IRKGaussLegendre.jl](https://github.com/mikelehu/IRKGaussLegendre.jl)
+ - [SciPyDiffEq.jl](https://github.com/SciML/SciPyDiffEq.jl)
+ - [… etc. many other choices!](https://docs.sciml.ai/DiffEqDocs/stable/solvers/ode_solve/)
In addition, due to the composability of the system, none of the components are directly
tied to the Flux.jl machine learning framework. For example, you can [use SciMLSensitivity.jl
@@ -193,8 +201,8 @@ to generate TensorFlow graphs and train the neural network with TensorFlow.jl](h
single line code changes by utilizing the underlying code generation. The tutorials shown here
are thus mostly a guide on how to use the ecosystem as a whole, only showing a small snippet
of the possible ways to compose the thousands of differentiable libraries together! Swap out
-ODEs for SDEs, DDEs, DAEs, etc., put quadrature libraries or
-[Tullio.jl](https://github.com/mcabbott/Tullio.jl) in the loss function, the world is your
+ODEs for SDEs, DDEs, DAEs, etc., put quadrature libraries or
+[Tullio.jl](https://github.com/mcabbott/Tullio.jl) in the loss function, the world is your
oyster!
As a proof of composability, note that the implementation of Bayesian neural ODEs required
@@ -203,18 +211,19 @@ Julia packages.
## Contributing
-- Please refer to the
- [SciML ColPrac: Contributor's Guide on Collaborative Practices for Community Packages](https://github.com/SciML/ColPrac/blob/master/README.md)
- for guidance on PRs, issues, and other matters relating to contributing to SciML.
-- See the [SciML Style Guide](https://github.com/SciML/SciMLStyle) for common coding practices and other style decisions.
-- There are a few community forums:
- - The #diffeq-bridged and #sciml-bridged channels in the
- [Julia Slack](https://julialang.org/slack/)
- - The #diffeq-bridged and #sciml-bridged channels in the
- [Julia Zulip](https://julialang.zulipchat.com/#narrow/stream/279055-sciml-bridged)
- - On the [Julia Discourse forums](https://discourse.julialang.org)
- - See also [SciML Community page](https://sciml.ai/community/)
+ - Please refer to the
+ [SciML ColPrac: Contributor's Guide on Collaborative Practices for Community Packages](https://github.com/SciML/ColPrac/blob/master/README.md)
+ for guidance on PRs, issues, and other matters relating to contributing to SciML.
+ - See the [SciML Style Guide](https://github.com/SciML/SciMLStyle) for common coding practices and other style decisions.
+ - There are a few community forums:
+
+ + The #diffeq-bridged and #sciml-bridged channels in the
+ [Julia Slack](https://julialang.org/slack/)
+ + The #diffeq-bridged and #sciml-bridged channels in the
+ [Julia Zulip](https://julialang.zulipchat.com/#narrow/stream/279055-sciml-bridged)
+ + On the [Julia Discourse forums](https://discourse.julialang.org)
+ + See also [SciML Community page](https://sciml.ai/community/)
## Citation
@@ -230,56 +239,72 @@ If you use SciMLSensitivity.jl or are influenced by its ideas, please cite:
```
## Reproducibility
+
```@raw html
The documentation of this SciML package was built using these direct dependencies,
```
+
```@example
using Pkg # hide
Pkg.status() # hide
```
+
```@raw html
and using this machine and Julia version.
```
+
```@example
using InteractiveUtils # hide
versioninfo() # hide
```
+
```@raw html
A more complete overview of all dependencies and their versions is also provided.
```
+
```@example
using Pkg # hide
-Pkg.status(;mode = PKGMODE_MANIFEST) # hide
+Pkg.status(; mode = PKGMODE_MANIFEST) # hide
```
+
```@raw html