OpenRISC SoC Practical Session Instructions
This session will have us
- introduced to OpenRISC and SoC development
- set up the OpenRISC SoC environment (RTL, EDA, software tool chain)
- simulate the SoC
- build the SoC and program the SoC onto the FPGA board
- connect to the SoC via a debugger, download and execute code
The OpenRISC project deals with architecture and implementation and tools development. Think of the architecture side as the instruction set manuals, the implementation side the model code (RTL, C, SystemC). The tools are things like the GNU compiler/debugger tool chain and chip debugger.
The synthesisable models we develop aren't much fun (or use) on their own. So we then integrate our synthesisable models into larger systems - a System on (a) Chip (SoC). When they are brought together with peripheral controllers (eg. I2C, SPI, Singlewire) and communications I/O (GPIO, UART, Ethernet, PCIE, etc.) and system infrastructure (memory, debug, interconnect) we then have a system which is capable of many things. Typically the "brains" of the system is the programmable CPU.
In the OpenRISC's case, these CPUs are relatively low-performance embedded-class processors. In an FPGA implementation we can run them up to 100MHz, and they execute up to a single instruction per cycle. However, in certain configurations they are capable of running full operating system kernels like Linux. They are more suited, however, to running embedded real-time operating systems (RTOS).
The OpenRISC 1000 architecture (OR1K or or1k) has a 32-bit instruction word and either 32 or 64-bit data. It it a reduced instruction set computer (RISC) meaning its instructions are relatively simple like:
add register 3 with register 6 and store in register 8
or
load the data at the memory address held in register 4 into register 5
In contrast, a more complex instruction set computer might be capable of doing much more in a single instruction word:
load the data at the memory address in register 2, increment it, compare with zero, and store back at the address held in register 3 while incrementing both registers 2 and 3
This should indicate something rather obvious, which is that the latter seems a lot harder to implement than the former. This means implementations of RISC computers require less logic, and the idea is that the complexity is offloaded onto the software compiler.
The OpenRISC project is lucky enough to have a good quality GNU tool chain port, and an LLVM port also exists. This allows us to compile C and C++ to OpenRISC 1000 machine code and execute it on our models. We also have software libraries in newlib (for baremetal) and uClibc (for Linux userspace, an EGLIBC port is in the works I believe), and the GNU debugger (GDB) which understands the OR1K architecture.
This session will demonstrate how to get an OpenRISC system up and running, using the latest CPU implementation the mor1kx. We will compile the CPU's development SoC for the Altera DE0 Nano FPGA board, program the board, and connect to the design with a debugger to download a program before running it.
This core is a relatively new OR1K processor implementation, started from scratch less than 2 years ago. It has a choice of 3 major variants, based on the pipeline architecture. They are the 3-stage pipeline espresso core, the 3-stage delay-slot-free pronto espresso core, and the 5-stage cappuccino core which can optionally have MMUs and caches, making it capable and powerful enough to run Linux.
It's development environment, the mor1kx-dev-env is a fork of the main OpenRISC SoC project, ORPSoC. This environment contains the test beds for the various mor1kx processor variants, and also build systems allowing us to synthesise the core for a variety of different FPGA boards.
There are several components which must be available for us to do this.
First of all, you must be on a Linux machine. I am using a relatively recent edition of Ubuntu, so all of the example commands will be specific to that. It is assumed you are relatively proficient at using the shell.
The following are the required components:
- The OpenRISC GNU tool chain (bare-metal, newlib-based,
or1k-elf-) - The mor1kx RTL, and the mor1kx-dev-env SoC development environment
- Icarus Verilog and GTKWave
- The Altera Quartus tools (for synthesis, board programming)
- OpenOCD debug proxy
It is recommended this process is performed completed before attempting any part of the process, as, for instance, the SoC development environment depends on all tools being available.
For these examples, we will use the directory $HOME/or1k
It is recommended the following development tools and libraries are installed. They will be necessary for various parts of the flow.
Under Ubuntu, apt-get the following:
sudo apt-get -y install build-essential make gcc g++ flex bison patch texinfo libncurses5-dev libmpfr-dev libgmp3-dev libmpc-dev libzip-dev python-dev libexpat1-dev libftdi-dev libtool autoconf
[or1k-elf- toolchain built in April 2013 from github sources (150MB)] (https://www.dropbox.com/s/hm3xl2ex9sn55jr/or1k-toolchain.tar.bz2)
Extract this under /opt to create the directory or1k-toolchain.
Then run the following to add the executables to your $PATH:
echo "# OpenRISC tool chain path" >> ~/.bashrc
echo "export PATH=$PATH:/opt/or1k-toolchain/bin" >> ~/.bashrc
These instructions are as per the project's GNU tool chain page on [OpenCores] (http://opencores.org/or1k).
What is required first is a copy of the tool chain source. There are two repositories - one for GCC (called or1k-gcc) and one for the rest of the GNU tools and libraries (binutils, GDB, newlib, called or1k-src). We must get the entirety of both.
You will need to download the repositories as a zip file OR use git.
Download zip files (save into $HOME/or1k):
... and unzip into the $HOME/or1k directory, making 2 directories or1k-src-or1k/ and or1k-gcc-or1k/
Rename those directories to be without the trailing -or1k so
mv or1k-src-or1k or1k-src
mv or1k-gcc-or1k or1k-gcc
or
git clone:
mkdir $HOME/or1k && cd $HOME/or1k
git clone git://github.com/openrisc/or1k-src.git
git clone git://github.com/openrisc/or1k-gcc.git
Once the source trees are in place, we will build.
We will install the tool chain into /opt/or1k-toolchain. Make sure that directory is writeable eg.:
sudo mkdir /opt/or1k-toolchain
sudo chown $USER /opt/or1k-toolchain
The following commands will build the tool chain (starting in the $HOME/or1k directory):
# Build the first set of tools, binutils etc.
# NOTE: on 32-bit machines --disable-werror is needed due to an enum acting as bit mask is considered signed
mkdir bld-or1k-src bld-or1k-gcc
cd bld-or1k-src
../or1k-src/configure --target=or1k-elf --prefix=/opt/or1k-toolchain --enable-shared --disable-itcl --disable-tk --disable-tcl --disable-winsup --disable-libgui --disable-rda --disable-sid --disable-sim --disable-gdb --with-sysroot --disable-newlib --disable-libgloss --disable-werror
make
make install
# Build gcc
cd ../bld-or1k-gcc
../or1k-gcc/configure --target=or1k-elf --prefix=/opt/or1k-toolchain --enable-languages=c --disable-shared --disable-libssp
make
make install
# build newlib and gdb (without or1ksim in this case)
cd ../bld-or1k-src
../or1k-src/configure --target=or1k-elf --prefix=/opt/or1k-toolchain --enable-shared --disable-itcl --disable-tk --disable-tcl --disable-winsup --disable-libgui --disable-rda --disable-sid --enable-sim --disable-or1ksim --enable-gdb --with-sysroot --enable-newlib --enable-libgloss
make
make install
# build gcc again, this time with newlib
cd ../bld-or1k-gcc
../or1k-gcc/configure --target=or1k-elf --prefix=/opt/or1k-toolchain --enable-languages=c,c++ --disable-shared --disable-libssp --with-newlib
make
make install
Finally, we will want to run the following to put this path in our .bashrc file:
echo "# OpenRISC tool chain path" >> ~/.bashrc
echo "export PATH=$PATH:/opt/or1k-toolchain/bin" >> ~/.bashrc
These are simply downloaded and installed, but take a long time!
You will want to download the Quartus II Web Edition.
It is recommended using the download manager program as it allows you to select exactly what to install.
The following are example steps to do this:
- Download the Quartus web installer
- If that link doesn't work, go to the Quartus software download page
- Click on
Download Linux Version - Avoid registering to download on the next page by selecting the Get One-Time Access radio button and entering spurious details then clicking the Get One-Time Access button below those boxes.
- Run the web installer, eg
chmod +x ~/Downloads/altera_installer.external.sh~/Downloads/altera_installer.external.sh- Click through and select to Download Installation Files from the Internet
- Choose a destination directory of wherever you like, however this guide will assume
/opt/altera/12.1.sp1 - In the Products window expand the
Device Familiestree and tick theCyclone IV Ebox - this is the family present on the DE0 Nano. - (Optional) Deselect the
Modelsim-Altera Starter Edition (Free)as it's big and we won't be using it. - Continue through and have it install.
When it's done, use the following to export the Altera tools to your $PATH:
echo "# Altera Quartus tools path" >> ~/.bashrc
echo "export ALTERA_PATH=/opt/altera/12.1sp1" >> ~/.bashrc
echo "export PATH=$PATH:$ALTERA_PATH/quartus/bin" >> ~/.bashrc
These are both open source projects, and should be installable via any modern Linux distributions package management system. Under Ubuntu it's as easy as
sudo apt-get install iverilog gtkwave
Otherwise see this guide on installing Icarus Verilog.
Or see GTKWave's homepage to get source for it.
OpenOCD is the debug proxy we'll use to talk to the board over JTAG.
Download the source to $HOME/or1k with
git clone https://github.com/openrisc/openOCD.git
Go into the OpenOCD directory and, the very first time, you must bootstrap it:
./bootstrap
Once that is finished, configure and compile it:
./configure --enable-usb_blaster_libftdi --enable-adv_debug_sys --enable-altera_vjtag --enable-maintainer-mode
make
You can run make install if you like, too.
The actual SoC development environment source is next.
Clone this from the github repository into $HOME/or1k
Once it's cloned, go into the mor1kx-dev-env directory and run a set script which will download the mor1kx core and set up a few other bits and pieces
./scripts/bash/setup.sh
We can simulate the RTL of the SoC with Icarus and view its internals.
We will run a technology-generic SoC build of the espresso mor1kx core.
cd boards/generic/mor1kx-espresso/sim/run
make rtl-test VCD=1
This will run a simulation, and the VCD=1 option will create a file known as a value change dump which records the status of every signal in the design for viewing afterwards.
If everything went OK you should see:
- Starting simulation of ORPSoC RTL.
- Test: or1k-basic
- VCD in ../out/or1k-basic.vcd
VCD info: dumpfile ../out/or1k-basic.vcd opened for output.
report(0x8000000d);
exit(0x00000000);
The report() functions lines are software indicating status. In this case it has sent the value 0x8000000d, or a hexadecimal pseudo-representation of GOOD. The exit code is 0 meaning no errors.
The software run by the processor in this test is in mor1kx-dev-env/sw/tests/or1k/sim/or1k-basic.S. It a test of a lot of basic instructions such as flag setting, jumping and arithmetic.
The results of the test are in the directory called out/ parallel to the run/ directory.
A trace of the processor's execution is created for each test, too. Inspect it with the following command
less ../out/or1k-basic-trace.log
The line has the format of an 'S' or 'U' to indicate whether the processor is in supervisor or user mode, the program counter (32-bits), the instruction for that PC (32-bits) the disassembly of the instruction, the result if any, and the status of the flag bit.
This pipeline has a delay slot which means that each jump or branch instruction will have its following instruction also executed before the branch is taken. The mor1kx's pronto espresso core does not use this delay slot behaviour.
We can load the VCD of the run with the following:
gtkwave ../out/or1k-basic.vcd
Once it has loaded we can navigate the hierarchy of the design. Expand the orpsoc_testbench and select the dut or design under test. Type in i_or12 to the Filter box and select those that come up and click Insert to add them to the waveform.
Use the plus and minus buttons to zoom in and out - at the beginning of a simulation signals are usually X which means undefined. They will not take a value until their reset condition has been met (an edge of the reset signal).
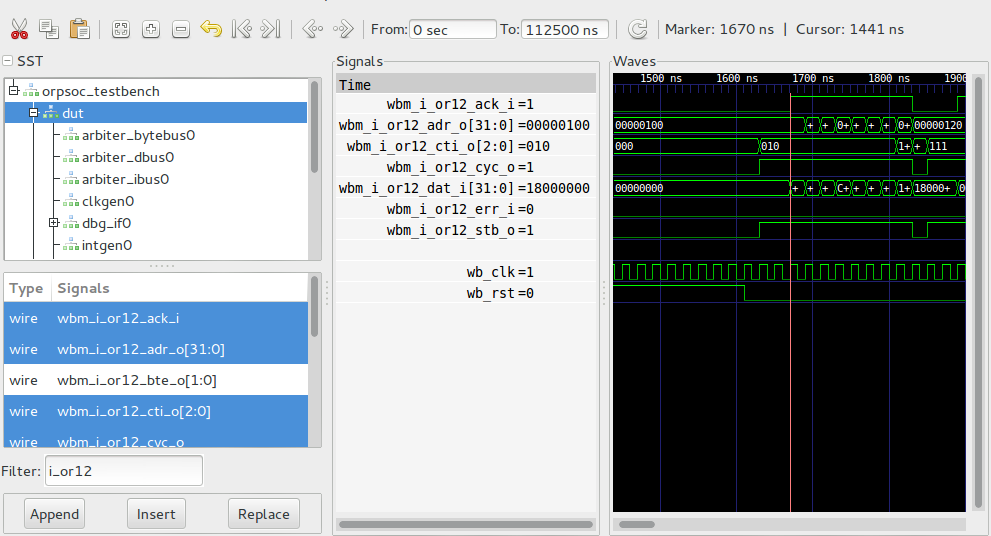
Here we can see the system being taken out of reset (wb_rst going from 1 to 0) and the processor starting to fetch from its reset address 0x100.
The bus interface (Wishbone bus protocol) is bursting in instructions from the memory, and we can see the first instruction request being acknowledged, or acked, by the bus slave and the address begins to change for the next instruction.
Zooming out further shows the behaviour of the bus over a greater a mount of time, indicating just how much is going on in a simple test.
We can run arbitrary tests by specifying TEST=<testname> at runtime. For example, we can run the simplest test, or1k-simple like so:
make rtl-test TEST=or1k-simple VCD=1
The software run by the processor in this test is in mor1kx-dev-env/sw/tests/or1k/sim/or1k-simple.c. It is just a C main() function. The C-runtime setup code is in mor1kx-dev-env/sw/drivers/mor1kx/crt0.S, an OR1K assembly file.
We can modify this file to printf something to the screen during simulation.
Open up the mor1kx-dev-env/sw/tests/or1k/sim/or1k-simple.c file and add the following:
#include "printf.h"- In the main loop do:
- printf("Hello World from the OpenRISC!\n");
The code should look something like this:
#include "cpu-utils.h"
#include "printf.h"
int main()
{
printf("Hello World from the OpenRISC!\n");
report(0x8000000d);
return 0;
}
Now re-run the test with:
make rtl-test TEST=or1k-simple
And we will see the hello world!
Note: The mechanism to get the characters to the console is not a simulated UART in this case, rather a method of signalling the characters to print to the simulator and the testbench code then simply prints the character using the Verilog $print() function.
We can now simulate a hello world over the UART. Add the following to or1k-simple.c:
-
#include "uart.h"and#include "board.h"before the printf include - call
uart_init(0);as the first thing inmain()
eg.:
#include "cpu-utils.h"
#include "board.h"
#include "uart.h"
#include "printf.h"
int main()
{
uart_init(0);
printf("Hello World from the OpenRISC via UART!\n");
report(0x8000000d);
return 0;
}
Run the test again:
make rtl-test TEST=or1k-simple
It will take a lot longer, as it's simulating the UART transmitting at 115200 baud.
Running and generating the VCD:
make rtl-test TEST=or1k-simple VCD=1
We can then look at the UART lines, and the processor's data accesses to the UART core over the bus.
This may take a little while to run on slower PCs
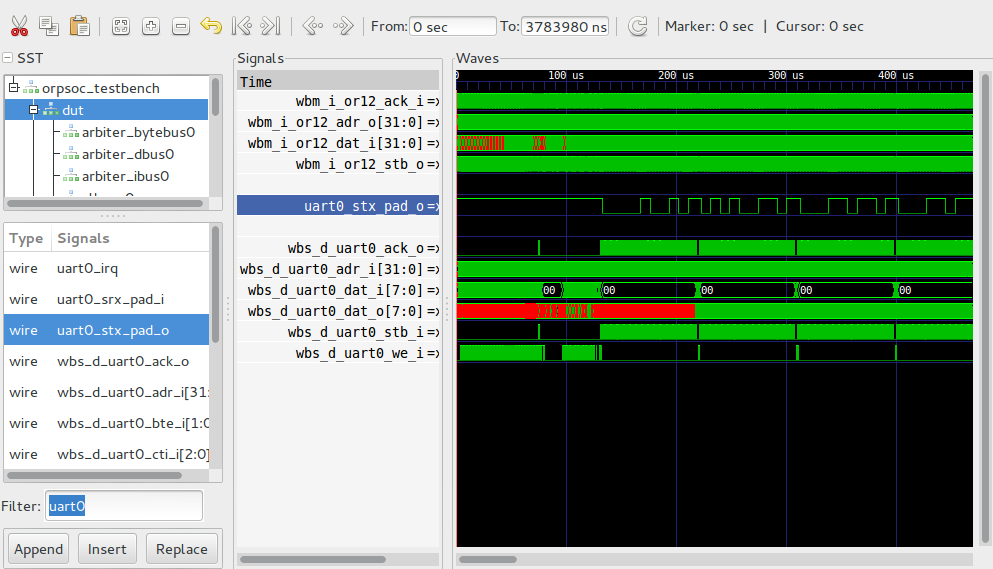
We can see the UART TX line (uart0_stx_pad_o) and the Wishbone interface to the UART peripheral - a lot of accesses are going on as the processor is polling the core to determine when the last byte has been transmitted.
We can, instead, run an example of the UART transmitting with interrupts. Run the software which already exists to demonstrate this:
make rtl-test TEST=uart-txinterrupt VCD=1
The software for this test is in mor1kx-dev-env/sw/tests/uart/sim/uart-txinterrupt.c.
Inspecting the VCD we get:
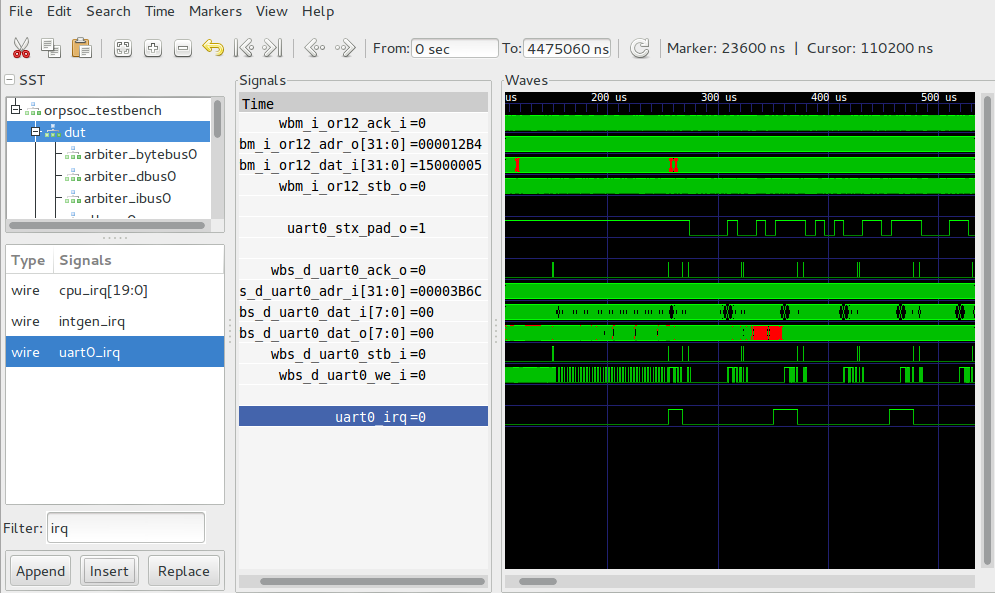
We can see much less activity on the UART's bus interface (the ack signal is no longer thrashing), and the IRQ line is now visible indicating when it finishes each character.
The next section will focus on building and running the system on the DE0 Nano.
The DE0 Nano source is under the mor1kx-dev-env/boards/altera/de0_nano
To synthesise the design using the Quartus tools we want to go into mor1kx-dev-env/boards/altera/de0_nano/syn/quartus/run
First it's best to clean everything:
make clean clean-sw
Here we simply run:
make asm
This will work as long as the $ALTERA_PATH is configured correctly.
This will generate an orpsoc.sof file which cna be programmed onto the board
In the synthesis directory, there is also a makefile recipe for programming the board:
make pgm
One of several things could go wrong here.
- One is that the JTAG daemon running needs to be killed and the Altera one run instead, to do this run:
killall jtagd
sudo /opt/altera/12.1sp1/quartus/bin/jtagd
-
Another problem might be that the OpenOCD debugger is still using the JTAG/USB port - exiting OpenOCD will fix this
-
Another could be basic permissions on the USB device, and running
sudo make pgmmay fix things
From within the OpenOCD directory (presumably $HOME/or1k/openOCD) run:
sudo ./src/openocd -f ./tcl/interface/altera-usb-blaster.cfg -f altera-dev.tcl
You should then see something like:
Info : JTAG tap: or1k.cpu tap/device found: 0x020f30dd (mfg: 0x06e, part: 0x20f3, ver: 0x0)
(ignore any warnings or errors about the JTAG tap...)
target state: halted
Chip is or1k.cpu, Endian: big, type: or1k
Once the proxy is connected we can then connect to it with GDB.
Note that when the proxy connects it will stall the processor.
In a new terminal run the OR1K port of the GNU debugger (GDB).
or1k-elf-gdb
Now connect to the port the proxy is running on:
(gdb) target remote :50001
You should see something like the following:
Remote debugging using :50001
0x00000700 in ?? ()
You can now access the system memory and registers.
Read memory with x <addr> eg:
(gdb) x 0x0
0x0: 0x00000000
See this table of GDB commands for further information.
We can compile software and load software from within GDB.
Some software we can run on the board to flash the LEDs is in the board's sw/tests/gpio/board directory:
(gdb) cd ~/or1k/mor1kx-dev-env/boards/altera/de0_nano/sw/tests/gpio/board/
(gdb) make gpio-blink.elf
Now tell GDB to use this compiled binary:
(gdb) file gpio-blink.elf
Download the file to the system's memory
(gdb) load
This will also set the CPU's program counter (PC) to point to the start address
Finally - run the program!
(gdb) c
....
Press ctrl+c to stall the processor and regain control of the GDB console.
Now build and load the gpio-int test to demonstrate a pushbutton triggering an interrupt:
(gdb) make gpio-int.elf
(gdb) file gpio-int.elf
(gdb) load
(gdb) c
Now press pushbutton 1 (marked KEY1) on the board to toggle an LED. Actually we are doing edge detection in the GPIO peripheral core. On the button being pressed we then install an interrupt handler for when it is released.
(gdb) cd ~/or1k/mor1kx-dev-env/boards/altera/de0_nano/sw/tests/simple_spi/board/
(gdb) make simple_spi-adxl345.elf
(gdb) file simple_spi-adxl345.elf
(gdb) load
(gdb) c
This software is communicating with the ADXL345 accelerometer and reading the X, Y and Z axis acceleration readings, determining which is greatest (and therefore, when at rest, perpendicular to earth's gravity).
LEDs 0 = X (positive)
LEDs 1 = Y (positive)
LEDs 2 = Z (positive)
LEDs 3 = X (negative)
LEDs 4 = Y (negative)
LEDs 5 = Z (negative)
(gdb) make simple_spi-adxl345fancy.elf
(gdb) file simple_spi-adxl345fancy.elf
(gdb) load
(gdb) c
Now double-tap the top of the board with a pen to see the LED pattern switch.