Drift in pose estimation #174
Description
Hi,
Currently we are using a Velodyne 3D Lidar in combination with the “loam_velodyne” package for localization. To combine the lidar and the IMU data, I decided to use your msf framework but unfortunately I have some difficulties setting it up.
For testing purposes, I implemented a model of a MAV and the Velodyne sensor in RotorS and tried to fuse the pose information from the lidar with the ground-truth IMU. The pose output of loam is pretty accurate and in combination with the perfect IMU information, a very good pose estimation should be the result. But, as you can see the in the image - the msf output looses accuracy over time, even though the MAV is not changing its position at all:
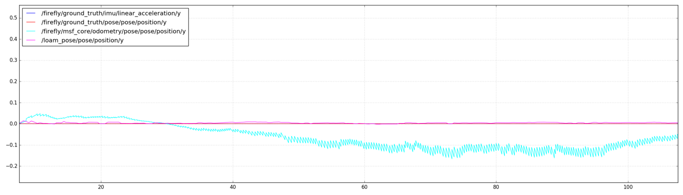
How is it possible that there is such a drift in the pose estimation if all my sensors deliver (almost) perfect data, are there any special settings that I have to consider? Also, I was not sure how to set the pose delay – how can I determine this value?
This is my .yaml file:

Thanks in advance!