欧姆定律:$U=IR$
电源的有载工作:$U=I(R+r)$, 其中$R$为电源内阻,$r$为负载电阻
功率和功率平衡:$P=UI=EI-R_0I^2$,其中$R_0$为电源内阻
- KCL:电路中任意一个节点的电流代数和为0,即$\sum\limits_{i=1}^n I_i=0$,其中$I_i$为流入节点的电流;
- KVL:电路中任意一个回路循行方向,回路中电压代数和为0,即$\sum\limits_{i=1}^n U_i=0$,其中$U_i$为沿着循行方向的电压
KCL推广:可以将电路中的某个部分看作一个节点,流入这个部分的电流等于流出这个部分的电流; KVL的电流表示:$\sum E=\sum U_z = \sum IR$,其中$E$为电源电动势,$U_z$为电阻$R$两端的电压。 KVL推广:对于一个开路,开口电压$U$等于电源电动势$E-IR$。
使用基尔霍夫定律时,应先标注出电流电压的参考方向,然后按照参考方向写出方程,最后解方程。
电位的概念:电路中某点相对于参考点的电势差。
一端口电路:将多个元件看作一个整体,只有两个端口与外部连接。如果两个一端口网络的端口处伏安特性相同,则这两个网络等效。
串联电路:$R=R_1+R_2+\dots+R_n$,$U=U_1+U_2+\dots+U_n$,$I=I_1=I_2=\dots=I_n$
并联电路:$\dfrac{1}{R}=\dfrac{1}{R_1}+\dfrac{1}{R_2}+\dots+\dfrac{1}{R_n}$,$U=U_1=U_2=\dots=U_n$,$I=I_1+I_2+\dots+I_n$
电压源模型:电压源与电阻串联,电压源的电压等于电源电动势,电阻等于电源内阻。
电流源模型:电流源与电阻并联,电流源的电流等于电源电流,电阻等于电源内阻。
二者的互相转化:对于一个电压源$E$内阻$R_0$与$R_L$串联,可视为一个电流源$I_s$内阻$R_0$与$R_L$并联,其中$I_s=\dfrac{E}{R_0}$即$E=I_sR_0$。
支路电流法:对于一个电路,将电路中的每个支路的电流都标注出来,然后根据基尔霍夫定律列出方程,最后解方程。一般来说,对于一个$n$个节点$b$条支路的电路,需要列出$n-1$个KCL方程,$b-n+1$个KVL方程,共$b$个方程,从而解出$b$个未知数(就是各个支路的电流)。
节点电压法:对于两个节点之间的若干支路,电流可通过基尔霍夫定律或者欧姆定律计算,再根据基尔霍夫定律,节点处的电流流入等于流出列方程。
Thevenin 定理:任何线性电路都可以用一个电压源和一个串联电阻来等效。
叠加定理:线性电路中,各个电源分别作用时,电路中任意两点间的电压等于各个电源分别作用时,电路中任意两点间的电压的代数和。
叠加定理的使用:将电路中的电源分别作用,求出各个电源作用时的电路中任意两点间的电压,然后将这些电压代数和,即可得到电路中任意两点间的电压。具体来说,将所有不作用的电压源视为短路,所有不作用的电流源视为开路。
Norton 定理:任何线性电路都可以用一个电流源和一个并联电阻来等效。
Thevenin 定理的使用:将两个端口短路,求出两个端口处的电流,即可得到等效电流源的电流,然后将两个端口开路,求出两个端口处的电压,于是可得到等效电流源的内阻。
此外,还有非线性的电阻,伏安特性曲线$U=f(I)$不是一条直线,而是一条曲线,这样的电阻称为非线性电阻。
非线性电阻的分析需要指明工作电流和工作电压,$R=\frac U I$,其中$U$为工作电压,$I$为工作电流,事实上$R$就是在这个点函数$f$的导数,即$R=\dfrac{\mathrm{d}U}{\mathrm{d}I}$。
(待补充)
电感$L$的单位是亨利(Henry),$1H=1\frac{V\cdot s}{A}$,即$1H$的电感,当电流变化率为$1A/s$时,其两端电压为$1V$。磁通量$\Phi$的单位是韦伯(Weber),$1Wb=1\frac{V\cdot s}{m^2}$,即$1Wb$的磁通量,当磁场变化率为$1T/s$时,其面积为$1m^2$。
当电感元件的磁通量或者电流发生变化时,会产生电动势:
根据基尔霍夫定律:
类似地,$(l.2)$两侧乘以$i$并从$0$到$t$积分,得到:
可见得电流增大,磁场能量增大,电能转化为磁能,反之磁能转化为电能,也就是说电感不消耗能量,是储能元件。
电容$C$单位是法拉(Farad),$1F=1\frac{C}{V}$,即$1F$的电容,当电压变化率为$1V/s$时,其两端电荷为$1C$。
当电容元件的电荷量或电压发生变化时,会产生电流:
(此式子中$u$和$i$参考方向相同)
将$(c.2)$式子两侧乘以$u$再从$0$到$t$积分,得到:
可见得电压增大,电场能量增大,电能转化为电场能量,反之电场能量转化为电能,也就是说电容不消耗能量,是储能元件。
此处的$L$、$C$、$R$可以理解为分别对应于机械系统中的质量$m$、弹簧常数$k$、阻尼系数$b$,三者在此处先规定为常数(实际情况更复杂);$u$、$i$可以理解为分别对应于机械系统中的位移$x$、速度$v$。
(本章内容下次补充,非考点范围的RC RL电路)
几个最基本的公式:
正弦电流的表示:
其中$I_m$为电流的最大值,也称为峰值电流,单位是安培(Ampere);但是实际上,我们更多地使用有效值,即:
类似地可以计算出
其中$U_m$为电压的最大值,也称为峰值电压,单位是伏特(Volt);类似于上面的推导我们可以得出其有效值为:
相位和初相位:
在这种情况下$i_0=I_m\sin\psi$,$\psi$称为初相位,单位是弧度(radian);而$\omega t+\psi$称为相位,单位也是弧度。
正弦量的表示,根据欧拉公式:
可以将一个特定的正弦量表示为一个复数$A$:
或者简写为:
其中$r$称为幅值,$\psi$称为相位,$A$称为复数。
由于$\omega$已知在同一个电路中通常是相同的,我们只需要考虑初相位的差异,就可以通过复数表示正弦量,称为相量。
注意这些标识,我们再来整理一下
| 量 | 瞬时值 | 有效值 | 峰值 | 相量 |
|---|---|---|---|---|
| 电压 | ||||
| 电流 |
这些标志在后面的分析中会经常用到,千万不要搞混了。
由此可见:
- 频率不变;
- 大小关系为$U=RI$;
- 相位关系为$\psi_u=\psi_i$,即相位差$\varphi=\psi_u-\psi_i=0$。
- 相量关系$\dot U = U\phase{\psi_u} = RI\phase{\psi_i} = R\dot I$
- 功率关系:
电感的电压电流关系为$u=L\frac{\mathrm{d}i}{\mathrm{d}t}$。代入$(ac.i.1)$,得到:
由此可见:
- 频率不变;
- 有效值的关系:$U=I\omega L$或者$I=\frac{U}{\omega L}$;
- 电压超前电流$\frac{\pi}{2}$,即$\psi_u=\psi_i+\frac{\pi}{2}$,即相位差$\varphi=\psi_u-\psi_i=\frac{\pi}{2}$。
感抗:$X_L=\omega L = 2\pi fL$
则有$U = X_LI$;
注意,感抗只是电压和电流的幅值或者有效值之比,不是瞬时值之比,即$\frac{u}{i}\neq X_L$,事实上电压和电流成导数关系,即$u=X_L\frac{\mathrm{d}i}{\mathrm{d}t} = XI_m\sin(\omega t+\frac{\pi}{2})$。
那么,对于相量,$\dot U = Ue^{j \frac{\pi}{2}}$,$\dot I = Ie^{j 0}$:
功率的计算:
由于电感不消耗能量,所以平均功率为0,只有电源和电感元件之间的能量转化,我们将这种能量转化的规模用无功功率(瞬时功率的幅值)来表示,即:
单位为伏特安培乘以秒,即瓦特秒(Watt second),也称为乏(Var)。
电容的电压电流关系为$i=C\frac{\mathrm{d}u}{\mathrm{d}t}$。代入$(ac.u.1)$,得到:
由此可见:
- 频率不变;
- 有效值的关系:$I=\omega CU$或者$U=\frac{I}{\omega C}$;
- 电流超前电压$\frac{\pi}{2}$,即$\psi_i=\psi_u+\frac{\pi}{2}$,即相位差$\varphi=\psi_u-\psi_i=-\frac{\pi}{2}$。
容抗:$X_C=\frac{1}{\omega C} = \frac{1}{2\pi fC}$
则有$U = \frac{I}{X_C}$;
注意,容抗只是电压和电流的幅值或者有效值之比,不是瞬时值之比,即$\frac{u}{i}\neq X_C$,事实上电流和电压成导数关系,即$i=X_C\frac{\mathrm{d}u}{\mathrm{d}t} = XI_m\sin(\omega t+\frac{\pi}{2})$。
那么,对于相量,$\dot U = Ue^{j \frac{\pi}{2}}$,$\dot I = Ie^{j 0}$:
功率的计算:
假设一个电路有一个电阻$R$,一个电感$L$,一个电容$C$,并联在一起,电压为$u$,电流为$i$,则有:
将式子里面的$R+j\left(X_L-X_C\right)$记为$Z$,则有:
其中$|Z|$称为阻抗模,$\frac{U}{I} = \sqrt{R^2+\left(X_L-X_C\right)^2} = |Z|$,单位为欧姆(Ohm);$\varphi$称为阻抗的幅角,$\varphi = \arctan\frac{X_L-X_C}{R}$,单位为弧度,即电流和电压的相位差。
可以将阻抗的复数形式理解为,实部为“阻”,虚部为“抗”,即阻抗的实部为电阻,虚部为电抗,电抗有两种,一种是感抗,一种是容抗;既表示了大小关系$|Z|$,也表示了相位关系$\varphi$。
可见,功率不仅与电源(发电机)的端电压和输出电流的有效值的乘积有关,还与负载的参数有关(因为负载会影响到$\varphi$),我们称$\cos(\varphi)$为功率因数 。
定义视在功率:
如果用直角三角形描述这个功率的关系,可以得到:

三相电压频率相同、相位差为
三相电路的连接方式分为:
- 星形连接(Y形连接)
- 三角形连接
发电机通常使用星形连接,即将三个末端连在一起,这个点称为中性点,中性点引出的导线称为中性线(或者零线),从始端引出的三根导线称为相线或者端线(俗称火线),中性线与任意一个相线的电压称为相电压,相电压的有效值一般记作$U_P$;任意两端间的电压称为线电压,线电压的有效值为$U_L$。
用相量表示相电压和线电压:
容易求出,相电压的矢量差为线电压,线电压超前于相电压
在中国大陆地区,三相电压的有效值为
在三相四线制中,很显然相电流和线电流是相同的。
设电源的相电压分别为$\dot U_1 = U_1 \phase 0^\circ$,$\dot U_2 = U_2 \phase{-120^\circ}$,$\dot U_3 = U_3 \phase{120^\circ}$,负载的阻抗分别为$\dot Z_1 = Z_1 \phase{\varphi_1}$,$\dot Z_2 = Z_2 \phase{\varphi_2}$,$\dot Z_3 = Z_3 \phase{\varphi_3}$,则三个相电流的相量为:
中性线的电流$\dot I_N = \dot I_1 + \dot I_2 + \dot I_3$。
当负载均衡时,即$Z_1 = Z_2 = Z_3$,则$\varphi_1 = \varphi_2 = \varphi_3$,此时中性线的电流为零。
这个时候中性线就可以被拆除,这样就可以节省一根导线,这种连接方式称为三相三线制。这种情况一般见于对称的三相负载,比如三相电机。
对于负载不均衡的情况,使用相量分别计算即可。
当出现负载短路时,考虑到短路处的电流过大导致熔断,此时这个支路其实断开而其他支路不受影响;对于中性线断开的情况(或者说三相三线制),未短路的两个支路相当于串联接在了线电压上。
三角形连结是指将三个负载分别连接在三相电源的三个相线上。
各相负载的电流有效值为:
相位差:
负载的线电流根据基尔霍夫定律,有:
当负载均衡时,即$Z_{12} = Z_{23} = Z_{31}$,则$\varphi_{12} = \varphi_{23} = \varphi_{31}$,此时:
此时,线电流和相电流的关系为:
- 线电流相位比相电流滞后
$\frac{\pi}{6}$ - 大小关系:$I_L = \sqrt{3}I_P$
总功率是三个相功率之和,当负载均衡时,三个相功率相等:
- 负载星形连结时
- 负载三角形连结时
代入
同理,视在功率和无功功率也可以得到类似的关系:
- 相电压($U_P$)的有效值相等,称为对称三相电压
- 三相电路的连接方式分为星形连接(Y形连接)和三角形连接
- Y连接时三相电压的相量差为线电压($U_L$),线电压超前于相电压
$\frac{\pi}{6}$ ,并且有效值的大小关系为:$U_P = \frac{U_L}{\sqrt{3}}$;相电流和线电流相等 - 负载Y形连接,就是三相四线制;负载均衡时,三相电路的中性线电流为零,此时可以拆除中性线,这种连接方式称为三相三线制
- 负载三角形连接,三相电路的线电流和相电流的关系为:$I_L = \sqrt{3} I_P$,线电流相位比相电流滞后
$\frac{\pi}{6}$
- 磁感应强度:$B$,单位:$T$(特斯拉)
- 磁通量:$\Phi=BS$,单位:$Wb$(韦伯)
- 磁场强度:$H=\frac{B}{\mu}$,单位:$A/m$(安培/米)
- 磁导率:$\mu=\frac{B}{H}$,单位:$H/m$(亨利/米)
- 真空磁导率:$\mu_0=4\pi \times 10^{-7} H/m$; 相对磁导率:$\mu_r=\frac{\mu}{\mu_0}=\frac{B}{B_0}$
即,磁场强度沿闭合回路的线积分等于回路上的电流的代数和。
磁饱和:当磁场强度增加时,磁感应强度不再增加,称为磁饱和。
磁滞性:磁滞性是指材料中磁感应强度总是滞后于外磁场强度的变化的性质。
根据磁性能,磁性材料分为:
- 软磁材料:磁滞回线较窄,矫顽磁力较小
- 永磁材料:磁滞回线较宽,矫顽磁力较大
- 矩磁材料:磁滞回线近乎矩形,剩磁大,矫顽磁力小,稳定性良好。
主磁通$\Phi$、漏磁通$\Phi_\sigma$与电动势的关系:
根据KVL:
其中
如果忽略电阻和漏磁通,
功率损耗:
-
铜损:$P_{Cu}=RI^2$
其中
$R$ 为线圈导线的电阻,$I$ 为线圈电流的有效值。 -
铁损:$P_{Fe}=K_f\Phi^2$
- 铁损中的磁滞损耗:$\Delta P_h$
- 铁损中的涡流损耗:$\Delta P_e$
同理,$E_2 = 4.44 f N_2 \Phi_m$。
根据KVL:
匝比(变比):
线电压之比也等于匝比:
线电压之比:
结论:变压器的电流变换比等于电压变换比的倒数$\frac{1}{K}$。
电压为$K$倍,电流为$\frac{1}{K}$倍,阻抗为$K^2$倍。
例子:SJL-1000/10,其中:
- S:三相(D:单相)
- J:油浸自冷式
- L:铝线圈
- 1000:额定容量为$1000kVA$
- 10:高压绕组的额定电压为$10kV$
-
额定电压${U_1}_N$、${U_2}_N$:
- 单相:${U_1}_N$,一次侧的电压;${U_2}_N$,二次侧的空载的电压
- 三相:${U_1}_N$,一次侧的线电压;${U_2}_N$,二次侧的线电压
-
额定电流${I_1}_N$、${I_2}_N$:
- 单相:${I_1}_N$,一次侧的电流;${I_2}_N$,二次侧的电流
- 三相:${I_1}_N$,一次侧的线电流;${I_2}_N$,二次侧的线电流
-
额定容量$S_N$:
- 单相:$S_N = {U_2}_N {I_2}_N \approx {U_1}_N {I_1}_N$
- 三相:$S_N = \sqrt{3} {U_2}_N {I_2}_N \approx \sqrt{3} {U_1}_N {I_1}_N$
输出功率$P_2 = U_2 I_2 \cos \varphi_2$,其中$\varphi_2$为二次侧的功率因数。
一次侧的输入功率$P_1 = P_2 + P_{Fe} + P_{Cu}$,其中$P_{Fe}$为铁损,$P_{Cu}$为铜损。
$\eta = \frac{P_2}{P_1}$ ,称为变压器的效率,一般$\eta > 0.95$;负载在额定容量的$50~75%$时,效率最高。 -
额定频率$f_N$:$50Hz$或者$60Hz$
- 自耦变压器:一次侧和二次侧共用一部分线圈,一般用于降压
- 电流互感器:一般用于测量电流
graph LR
A[电动机] --> B[交流电动机]
B --> E[异步电动机]
B --> F[同步电动机]
E --> G[三相电动机]
E --> H[单相电动机]
A --> C[直流电动机]
定子三相绕组通入三相交流电。三相交流电的相位差为


如果需要调节电机的旋转方向,就需要对其两根进线进行调换,这样形成的磁场和调换之前的恰好相反,也就使得电机能反转。
旋转磁场的极对数$P$与三相绕组的排列有关。转速与极对数的关系:
单位:转/分
电动机转子和磁场旋转方向一致,但是$n < n_0$,这个差值称为转差率,这是因为转子的转动是磁通切割转子的导条,这个前提就是二者不是完全同步的。转差率:
也可以写作:$n=(1-s)n_0$
异步电机运行中,一般$s=(1\sim 9)%$。
三相异步电机的电磁关系和变压器类似。
旋转磁场的磁通$\Phi$:
定子感应电动势的频率(等于电源的频率):
转子的感应电动势频率:
转子感应电动势:
当转速$n=0$ 时,$f_2$最大,此时$E_2$最大,记为$E_{20}$,即:
转子的感抗$X_2$:
类似的,$n=0$ 时,$X_2$最大,记为$X_{20}$,即:
转子电流:
功率因素:
- 当$s$很小时,$\cos \varphi_2 \approx 1$,功率因数接近于1,电机效率高;
- 当$s$很大时,$\cos \varphi_2 \propto \frac{1}{s}$,电机效率低。
我们分析可知,这上面的所有物理量都与转差率,或者说与转速有关
转矩公式
- 额定转矩$T_N$:
$$T = \frac{P}{\frac{2\pi n}{60}} = 9550 \frac{P}{n}$$ 那么额定转矩$T_N = 9550 \frac {P_N}{n_N}$ 单位:$N \cdot m$ - 最大转矩$T_{max}$: 令$\frac{\mathrm d T}{\mathrm d s} = 0$,得到$S=S_m = \frac{R_2}{X_20}$,代入转矩公式 $$ T_{max} = K \frac{U_1^2}{2X_{20} } $$ 负载转矩不得大于最大转矩,否则堵转。
- 过载系数 $$ \lambda = \frac{T_{max} }{T_N} $$ 一般$\lambda$在1.8~2.2
- 起动转矩$T_{st}$ 起动时$n=0$,$s=1$,代入转矩公式, $$ T_{st} = K \frac{R_2 U_1^2}{R_2^2 + X_{20}^2} $$ 若$T_{st} > T_2$则电动机可以起动,否则不能。
- 起动能力 $$ K_{st} = \frac{T_{st} }{T_N} $$
转矩平衡条件:
- 转子轴上的转矩$T_2 = T - T_0$,其中$T_0$为转子的机械转矩
- 空载转矩:$T_0$
- 输出转矩:$T_2 = T - T_0 \approx T$
- 负载转矩:$T_Z$
- 当$T_Z = T_2$时,电动机处于稳定转速
- 当$T_Z > T_2$时,电动机加速
- 当$T_Z < T_2$时,电动机减速
负载对电动机运行的影响:电动机的电磁转矩随负载变化自动调整,称为自适应负载能力。
- 直接起动: 电动机的起动电流很大,会导致电网电压下降,影响其他设备的正常运行,因此不常用。
- 降压启动: 通过星形-三角形换接,或者自耦降压
- 转子串电阻起动: 绕线式电机
三角形连结时,$I_{l\Delta } = \sqrt{3}\frac{U_l}{Z}$
星形连结时,$I_{lY} = \frac{U_l}{\sqrt{3}Z}$
因此,降压起动,电流为三分之一
类似地,$T_{stY} = \frac{1}{3}T_{st\Delta}$
- 仅适用于正常运行为三角形连结的电动机
- 换接适用于轻载或者空载
- 适用于容量大、或者正常运行时为Y连结而不能使用$Y-\Delta$起动的鼠笼式异步电动机
- 无极调速:改变电源频率
- 变极调速:改变极对数$P$,改变电机的转速
- 能耗制动:断开交流电流,通入直流电流
- 反接制动:将电动机的两根进线交换,使得电动机反转,此时电动机的转矩方向与负载转矩方向相反,从而实现制动
- 发电反馈制动:电动机转子速度大于旋转磁场速度,驱动转矩变为制动转矩
例子:Y132M-4,其中:
- Y:三相异步电动机
- 132:基座中心高,单位:$mm$
- M:基座长度代号,单位:$mm$
- 4:磁极数(极对数的两倍)
其他内容参考课本,这里不再赘述。
本征半导体:在半导体中,每个原子都有四个价电子,当半导体中的原子数目足够多时,每个原子都可以与四个相邻原子共享一个价电子,形成共价键,这样的半导体称为本征半导体。
杂质半导体:在半导体中,掺入少量杂质,使得半导体中的原子数目不足以与相邻原子共享四个价电子,这样的半导体称为杂质半导体。分为N型半导体和P型半导体。
N型半导体:掺入的杂质原子有五个价电子(如磷、砷、锑),其中四个价电子与相邻原子共享,而剩下的一个价电子处于自由状态,这样的半导体称为N型半导体。
P型半导体:掺入的杂质原子有三个价电子(如硼、镓、铟),其中三个价电子与相邻原子共享,而剩下的一个价电子处于缺电子状态,这样的半导体称为P型半导体。
PN结:将N型半导体和P型半导体的晶体片背靠背地粘合在一起,使得P型半导体中的自由电子与N型半导体中的空穴结合,形成一个电子云,这样的结构称为PN结。
PN结具有单向导电性,当 P 接入正电压,N 接入负电压时,正向电流较大、电阻较小,为导通状态(正向偏置);当 P 接入负电压,N 接入正电压时,正向电流较小、电阻较大,为截止状态(反向偏置)。
温度越高,反向电流越大。
二极管分为:点接触型、面接触型、平面型。

主要参数:
- 最大整流电流$I_{OM}$:允许流过二极管的最大正向电流。
- 反向工作峰值电压$U_{RWM}$:保证二极管在反向工作时不会击穿的最大反向电压。
- 最大反向电流$I_{RM}$:二极管加最高反向电压时的反向电流。
- 正向偏置:正向导通,正向的电阻较小,正向的电流较大
- 反向偏置:反向截止,反向的电阻较大,反向的电流较小
- 反向击穿:反向电压超过反向工作峰值电压时,二极管会击穿,反向电流急剧增大,二极管会被烧毁
二极管的反向电流受温度影响较大,温度越高反向电流越大。
对于理想二极管,正向导通的时候压降为0,反向截止的时候二极管相当于断开。
二极管的分析方法:将其视为断路,比较两侧的电势。
文雅二极管在工作时加反向电压。工作状态为反向击穿,此时电压变化很小但是电流变化较大,使用时应加限流电阻。
主要参数:
- 稳定电压$U_Z$:稳压二极管在工作时(反向击穿)的电压。
- 电压温度系数$\alpha_U$:环境温度每变化 1 开尔文,稳压二极管的稳定电压变化的百分比。
- 动态电阻$r_z = \frac{\Delta U_Z}{\Delta I_Z}$:稳压二极管在工作时的动态电阻,$r_Z$ 越小,稳压性能越好。
- 最大稳定电流$I_{ZM}$、稳定电流$I_Z$
- 最大允许耗散功率$P_{ZM} = U_Z I_{ZM}$
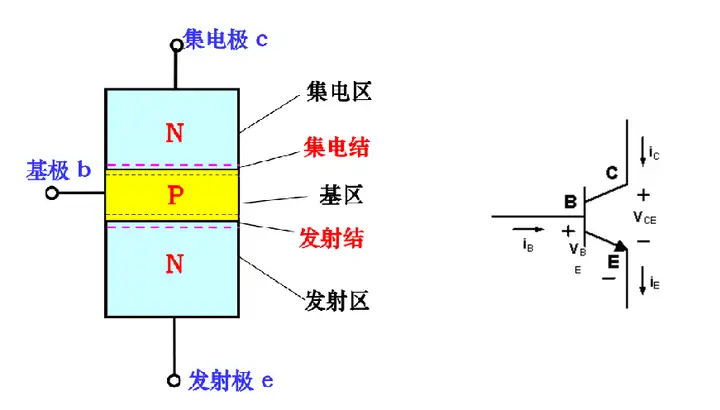
- NPN 三极管:P 型半导体夹在两个 N 型半导体之间
- PNP 三极管:N 型半导体夹在两个 P 型半导体之间

三极管的电流关系:
因为$I_B
动态电流放大率,基极电流的较小的变化放大为集电极电流较大的变化:
以 NPN 型三极管为例,发射结正向偏置,集电结反向偏置。
- 发射结正向偏置,发射区的电子扩散进入基区,并不断从电源获取新的电子,形成发射极电流
$I_E$ ;由于基区的空穴浓度比发射区的自由电子浓度小得多,空穴向发射极的扩散忽略不计; - 发射区扩散到基区的电子主要聚集在发射结,而靠近集电结的电子密度较低,因而自由电子会继续向集电结扩散,过程中不断与基区的空穴结合;由于基区接电源的正极,基区中的电子不断被拉走,使得基区的空穴不断得到补充,形成了电流$I_{BE}$——基本上等于基极电流$I_B$;由于基区很薄而且掺杂度不高,绝大部分的电子都最终到了集电结的边缘;
- 由于集电结的反偏,阻挡了集电区的自由电子往基区扩散,但是能反过来把发射区扩散上来的自由电子拉到几点去,形成了集电极电流$I_{CE}$——基本上等于集电极电流$I_C$;除此以外,集电区的少数载流子(空穴)和基区的少数载流子(自由电子)相向运动,形成了少量的集电极电流$I_{CBO}$——数值很小因为都是少数载流子,但是受温度影响很大而且与外界电压关系不大。
严格意义上,三极管的电流关系为:
根据已知,$I_C$远大于$I_B$,而且对于一个很小的$\Delta I_B$,会引起一个很大的$\Delta I_C$。
外部条件:发射结正向偏置,集电结反向偏置。

NPN 型三极管,集电极电位最高,发射极电位最低;PNP 型三极管,集电极电位最低,发射极电位最高——而且都是负值,因为电流从发射极流入,方向和 NPN 是反的。
探究共发射极接法的特性曲线。

对于上述电路图,输入特性曲线(非线性):
对于$U_{CE}$为常数时,基极电流$I_B$随$U_{BE}$的变化关系

当发射结电压大于死区电压时才会出现$I_B$
输出特性
- 放大区
在放大区,$I_C = \beta I_B$,为线性区,具有恒流源特性。放大区,发射结正偏,集电结反偏。 - 截止区
$I_B < 0$ ,有$I_C = 0$,为截止区,具有开路特性。截止区,发射结反偏,集电结反偏。 - 饱和区
$U_{CE} \leq U_{BE}$ ,有$\beta I_B \geq I_C$,为饱和区,发射结正偏,集电结正偏。
实质是将小能量的信号通过三极管的控制作用,将放大电路直流电源的能量转化为交流输出。

对放大电路的要求:
- 要有合理的放大倍数
- 尽可能小的波形失真

放大电路无信号输入时的电路状态。
放大电路有(交流)信号输入时的电路状态。此时电容视为短路,并简化电路图为:

输入回路,对于一个极小的$\Delta U{BE}$,近似认为晶体管电流的变化量与其线性相关,即:
$$ r_{BE} = \frac{\Delta U_{BE}}{\Delta I_B} \Big |{U{CE} } = \frac {u_{be}}{i_b} \Big |{U{CE} } $$
对于小功率二极管,$r_{BE} \approx 200 \Omega + (1+\beta) \frac {26 mV}{I_E}$,其中$\beta$为静态电流放大系数,$I_E$为静态电流。
对于输出回路,晶体管放大系数$\beta$:
$$ \beta = \frac{\Delta I_C}{\Delta I_B} \Big |{U{CE} } = \frac {i_c}{i_b} \Big |{U{CE} } $$
一般情况下,$\beta$在20~200之间。
输出电阻(阻值很高):
$$ r_{CE} = \frac{\Delta U_{CE}}{\Delta I_C} \Big |{I_B} = \frac {u{ce}}{i_c} \Big |_{I_B} $$
因此,对于微变,将晶体三极管可等效为:

使用相量推导电压放大倍数$A_u$:
其中$r_{ce}$为$R_C$与$R_L$并联后的电阻。如果$R_L$未接入(断路),则$A_u = -\beta \frac{R_C}{r_{be}}$。
对于输入电阻,$r_i = \frac {\dot U_i}{\dot I_i}$,希望信号源获得的输入电流足够小,因此输入电阻应较大。
由于$r_i$为$R_B$与$r_{be}$并联后的电阻,当$R_B$很大时,$r_i \approx r_{be}$。
对于输出电阻,$r_o = \frac {\dot U_o}{\dot I_o}$。输出电阻表示了放大电路带负载的能力。一般希望较小的输出电阻。
要求$r_i$,一般先断开负载$R_L$,另输入电压为0,外加电压$\dot U_o$,求$\dot I_o$: