Camera calibration
Camera calibration is done with v4l2stereo software.
Done on Linux Mint 17.0 x86.
/dev/videoX sources will change depending if you have other cameras or not.
cd object\ recognition/v4l2stereo/
make
./v4l2stereo --dev0 /dev/video1 --dev1 /dev/video0 --calibrate "6 9 24"
v4l2stereo will start taking photos of chessboard pattern if it is detected. Our board has 6 x 9 squares of 24mm.
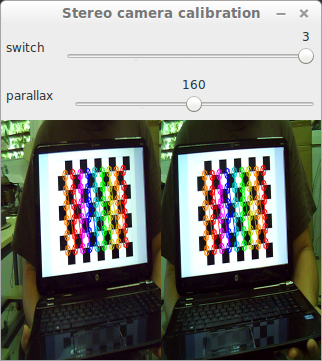
After 20 photos (can be changed with --calibrationimages argument) v4l2stereo generates calibration.txt file containing camera intrinsic, extrinsic and rectification parameters.
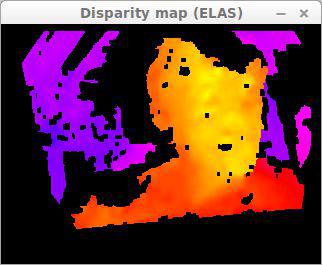
You can test the results running depth calculation with
./v4l2stereo --dev0 /dev/video1 --dev1 /dev/video0 --disparitymap --equal
More information in https://code.google.com/p/sentience/wiki/MinoruWebcam.
Wall-E Documentation by IEEE Student Branch of Granada is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
