Nesta avaliação vocês irão criar um sistema que controla um motor de passos.
Periféricos:
- PIO
- RTT
- OLED
freeRTOS:
- Task
- Queue
- Semaphore
Motor de passos:
- Motor de passo 28BYJ-48
- Quatro fases
0,17578125graus por passo /2048passos para completar360º
O motor de passo é um motor elétrico sem bobinas (brushless) que permite movimentarmos o rotor (a parte que gira) em passos. Os passos são valores em graus que dependem da construção do motor e de como ele é acionado.
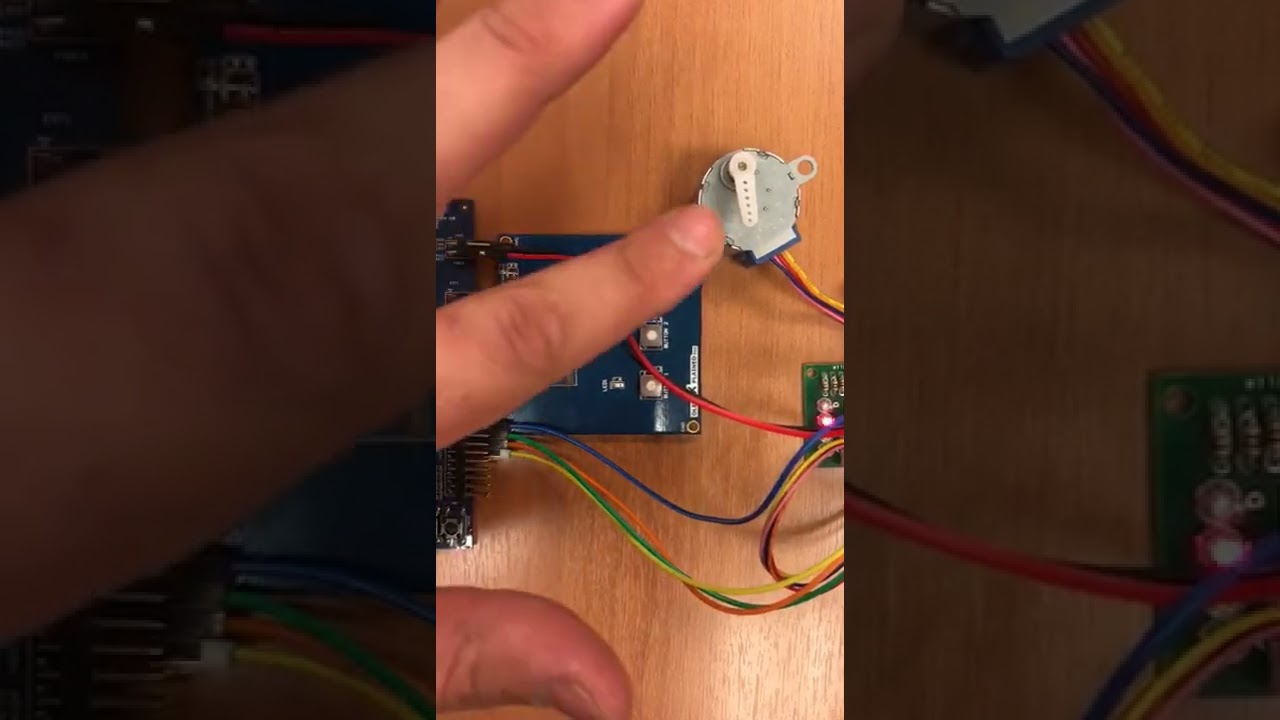
O gif a seguir ilustra um motor de passos em movimento, no caso ele possui quatro fases. Ao lado está o gif que mostra o driver e o motor utilizados nessa avaliação:


Notem que para fazermos o motor girar é preciso acionar as fases em sequência: 1000 -> 0100 -> 0010 -> 0001 e então repetir esse ciclo, X vezes até obtermos o ângulo de deslocamento esperado. Se o movimento for o oposto: 1000 -> 0001 -> 0010 -> 0100 -> ... o motor irá girar para o lado contrário.
Cada passo (passagem entre 1000 <- -> 0100) aplica um movimento no rotor de alguns graus (no caso do motor que iremos usar 0,17578125).
OBS: O tempo mínimo entre fases para esse motor é de 5ms, menos que isso o motor não consegue girar.
A interface do motor de passos com o microcontrolador vai se dar através do acionamento de quatro pinos que é conectado a um módulo de potência:

- Alimente o motor com +5V e GND.
- Escolha quatro pinos do uC e conecte as fases.

A entrega deve ser um sistema que permite controlarmos o motor de passos, fazendo-o girar em valores de ângulo pré estabelecidos. O controle do sistema será realizado via a placa OLED e seus botões (não vamos usar os LEDs). O display deve exibir qual foi a opção selecionada:
- BTN 1: Gira o motor 180° no sentido horário
- BTN 2: Gira o motor 90° no sentido horário
- BTN 3: Gira o motor 45° no sentido horário
O diagrama a seguir ilustra a Interface homem-máquina (IHM) prevista:

{kind=link}
{kind=link}
{kind=link}
Vocês devem desenvolver o firmware como indicado a seguir:

- O código base fornecido é o
RTOS-OLED-Xplained-Projá com o RTT adicionado no wizard.
Onde:
-
Botões:
- devem ser configurados para funcionar com
callback - devem enviar por uma fila
xQueueModoum inteiro que representa o ângulo de rotação e a direção- exemplo: 45, 90, 180, ....
- devem ser configurados para funcionar com
-
task_modo- Responsável por ler a opcão do usuário via
xQueueModo - Deve fazer a conta e traduzir ângulo em passos
- Enviar a informação para a fila
xQueueStepsno seguinte formato(direção)(número de passos):- exemplo para 90 ->
(90 / 0,17578125)->512passos - o dado que vai para fila é
512
- exemplo para 90 ->
- Exibe no OLED o valor selecionado em graus
- Responsável por ler a opcão do usuário via
-
task_motor- Recebe pela fila a quantidade de passos e o sentido de rotação e aciona o motor
- Deve usar o RTT para calcular o tempo que cada fase fica acionada (velocidade do motor)
- A comunicação RTT e task deve ser feita via semáforo
xSemaphoreRTT
- A comunicação RTT e task deve ser feita via semáforo
-
RTT
- Irá dar a base de tempo que cada fase fica acionada
- Configurado em modo alarme para contar 5ms
- Toda vez que estourar o alarme, liberar semáforo
xSemaphoreRTT

- Inicialize os pinos do motor, testando os movimentos, fazendo-o girar no sentiro horário
- Faça o teste do OLED,
task_modo, callback dos botões,xQueueModo - Crie a fila
xQueueStepse comece enviar o dado dos passos - Crie a
task_motor - Receba os dados da fila
xQueueStepse acione o motor - Criei O rtt para operar com IRQ a cada 5ms